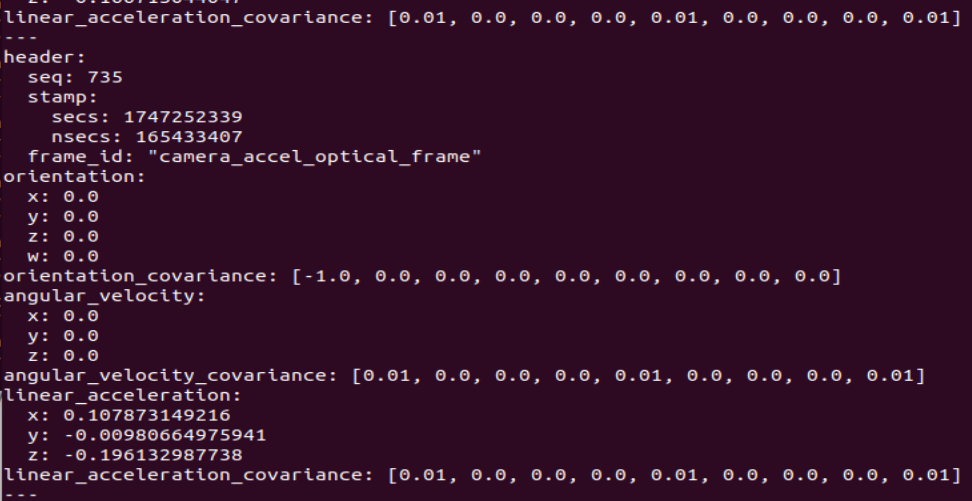
Abnormal IMU data values obtained from the D456 camera using ROS.
When using ros to obtain the IMU data from the D456 camera, I found that the y-axis values of acceleration and angular velocity were abnormal and always close to 0 (no matter how I rotated), whereas they appeared normal when viewed through the realsense-viewer.
-
this is rs_camera.launch
<launch>
<arg name="serial_no" default=""/>
<arg name="usb_port_id" default=""/>
<arg name="device_type" default=""/>
<arg name="json_file_path" default=""/>
<arg name="camera" default="camera"/>
<arg name="tf_prefix" default="$(arg camera)"/>
<arg name="external_manager" default="false"/>
<arg name="manager" default="realsense2_camera_manager"/>
<arg name="output" default="screen"/>
<arg name="respawn" default="false"/><arg name="fisheye_width" default="-1"/>
<arg name="fisheye_height" default="-1"/>
<arg name="enable_fisheye" default="false"/><arg name="depth_width" default="-1"/>
<arg name="depth_height" default="-1"/>
<arg name="enable_depth" default="true"/><arg name="confidence_width" default="-1"/>
<arg name="confidence_height" default="-1"/>
<arg name="enable_confidence" default="true"/>
<arg name="confidence_fps" default="-1"/><arg name="infra_width" default="848"/>
<arg name="infra_height" default="480"/>
<arg name="enable_infra" default="false"/>
<arg name="enable_infra1" default="false"/>
<arg name="enable_infra2" default="false"/>
<arg name="infra_rgb" default="false"/><arg name="color_width" default="-1"/>
<arg name="color_height" default="-1"/>
<arg name="enable_color" default="true"/><arg name="fisheye_fps" default="-1"/>
<arg name="depth_fps" default="-1"/>
<arg name="infra_fps" default="30"/>
<arg name="color_fps" default="-1"/>
<arg name="gyro_fps" default="-1"/>
<arg name="accel_fps" default="-1"/>
<arg name="enable_gyro" default="true"/>
<arg name="enable_accel" default="true"/><arg name="enable_pointcloud" default="false"/>
<arg name="pointcloud_texture_stream" default="RS2_STREAM_COLOR"/>
<arg name="pointcloud_texture_index" default="0"/>
<arg name="allow_no_texture_points" default="false"/>
<arg name="ordered_pc" default="false"/><arg name="enable_sync" default="false"/>
<arg name="align_depth" default="false"/><arg name="publish_tf" default="true"/>
<arg name="tf_publish_rate" default="0"/><arg name="filters" default=""/>
<arg name="clip_distance" default="-2"/>
<arg name="linear_accel_cov" default="0.01"/>
<arg name="initial_reset" default="false"/>
<arg name="reconnect_timeout" default="6.0"/>
<arg name="wait_for_device_timeout" default="-1.0"/>
<arg name="unite_imu_method" default="false"/>
<arg name="topic_odom_in" default="odom_in"/>
<arg name="calib_odom_file" default=""/>
<arg name="publish_odom_tf" default="true"/><arg name="stereo_module/exposure/1" default="7500"/>
<arg name="stereo_module/gain/1" default="16"/>
<arg name="stereo_module/exposure/2" default="1"/>
<arg name="stereo_module/gain/2" default="16"/>
<group ns="$(arg camera)">
<include file="$(find realsense2_camera)/launch/includes/nodelet.launch.xml">
<arg name="tf_prefix" value="$(arg tf_prefix)"/>
<arg name="external_manager" value="$(arg external_manager)"/>
<arg name="manager" value="$(arg manager)"/>
<arg name="output" value="$(arg output)"/>
<arg name="respawn" value="$(arg respawn)"/>
<arg name="serial_no" value="$(arg serial_no)"/>
<arg name="usb_port_id" value="$(arg usb_port_id)"/>
<arg name="device_type" value="$(arg device_type)"/>
<arg name="json_file_path" value="$(arg json_file_path)"/><arg name="enable_pointcloud" value="$(arg enable_pointcloud)"/>
<arg name="pointcloud_texture_stream" value="$(arg pointcloud_texture_stream)"/>
<arg name="pointcloud_texture_index" value="$(arg pointcloud_texture_index)"/>
<arg name="enable_sync" value="$(arg enable_sync)"/>
<arg name="align_depth" value="$(arg align_depth)"/><arg name="fisheye_width" value="$(arg fisheye_width)"/>
<arg name="fisheye_height" value="$(arg fisheye_height)"/>
<arg name="enable_fisheye" value="$(arg enable_fisheye)"/><arg name="depth_width" value="$(arg depth_width)"/>
<arg name="depth_height" value="$(arg depth_height)"/>
<arg name="enable_depth" value="$(arg enable_depth)"/><arg name="confidence_width" value="$(arg confidence_width)"/>
<arg name="confidence_height" value="$(arg confidence_height)"/>
<arg name="enable_confidence" value="$(arg enable_confidence)"/>
<arg name="confidence_fps" value="$(arg confidence_fps)"/><arg name="color_width" value="$(arg color_width)"/>
<arg name="color_height" value="$(arg color_height)"/>
<arg name="enable_color" value="$(arg enable_color)"/><arg name="infra_width" value="$(arg infra_width)"/>
<arg name="infra_height" value="$(arg infra_height)"/>
<arg name="enable_infra" value="$(arg enable_infra)"/>
<arg name="enable_infra1" value="$(arg enable_infra1)"/>
<arg name="enable_infra2" value="$(arg enable_infra2)"/>
<arg name="infra_rgb" value="$(arg infra_rgb)"/><arg name="fisheye_fps" value="$(arg fisheye_fps)"/>
<arg name="depth_fps" value="$(arg depth_fps)"/>
<arg name="infra_fps" value="$(arg infra_fps)"/>
<arg name="color_fps" value="$(arg color_fps)"/>
<arg name="gyro_fps" value="$(arg gyro_fps)"/>
<arg name="accel_fps" value="$(arg accel_fps)"/>
<arg name="enable_gyro" value="$(arg enable_gyro)"/>
<arg name="enable_accel" value="$(arg enable_accel)"/><arg name="publish_tf" value="$(arg publish_tf)"/>
<arg name="tf_publish_rate" value="$(arg tf_publish_rate)"/><arg name="filters" value="$(arg filters)"/>
<arg name="clip_distance" value="$(arg clip_distance)"/>
<arg name="linear_accel_cov" value="$(arg linear_accel_cov)"/>
<arg name="initial_reset" value="$(arg initial_reset)"/>
<arg name="reconnect_timeout" value="$(arg reconnect_timeout)"/>
<arg name="wait_for_device_timeout" value="$(arg wait_for_device_timeout)"/>
<arg name="unite_imu_method" value="$(arg unite_imu_method)"/>
<arg name="topic_odom_in" value="$(arg topic_odom_in)"/>
<arg name="calib_odom_file" value="$(arg calib_odom_file)"/>
<arg name="publish_odom_tf" value="$(arg publish_odom_tf)"/>
<arg name="stereo_module/exposure/1" value="$(arg stereo_module/exposure/1)"/>
<arg name="stereo_module/gain/1" value="$(arg stereo_module/gain/1)"/>
<arg name="stereo_module/exposure/2" value="$(arg stereo_module/exposure/2)"/>
<arg name="stereo_module/gain/2" value="$(arg stereo_module/gain/2)"/><arg name="allow_no_texture_points" value="$(arg allow_no_texture_points)"/>
<arg name="ordered_pc" value="$(arg ordered_pc)"/>
</include>
</group>
</launch> -
Hello, if you are using the ROS1 version of the RealSense ROS wrapper (as indicated by your use of the rs_camera.launch launch file) then the RealSense SDK (librealsense) version should ideally be 2.50.0 instead of 2.55.1. The ROS1 wrapper version should be 2.3.2. This is because the ROS1 wrapper was no longer actively updated after SDK 2.50.0 and only the ROS2 wrapper receives updates.
I understand why you are using 2.55.1 though, as the D456 camera model was not supported in the SDK until version 2.54.1 onwards.
In the RealSense Viewer, an option called Enable Motion Correction is enabled by default in the Motion Module controls and 'fixes' the IMU data. Does it make a difference if you enable this feature in ROS using the launch instruction below, please?
roslaunch realsense2_camera rs_camera.launch enable_accel:=true enable_gyro:=true unite_imu_method:="linear_interpolation" enable_motion_correction:=true
-
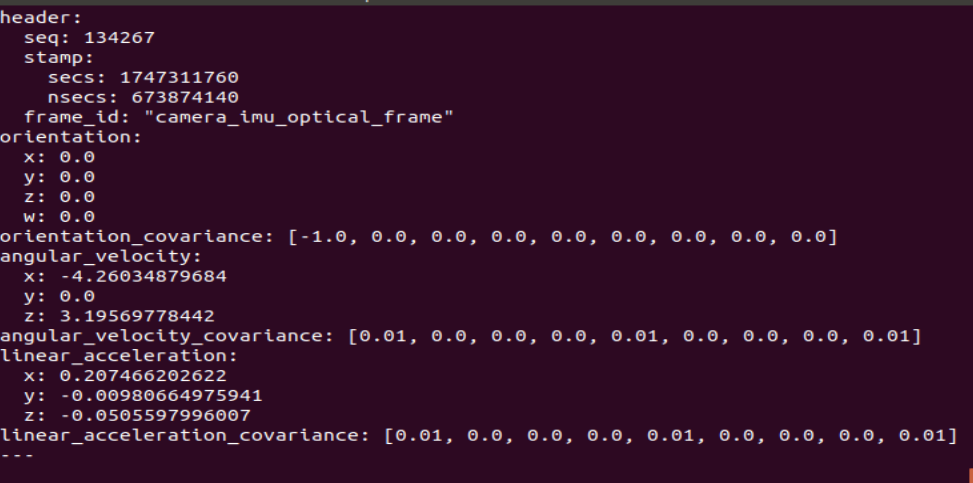
I tried according to your instructions, but there are still no changes; the y-axis values of its acceleration and angular velocity remain 0, but the values on the x and z axes seem normal. What should I do now? Should I install librealsense 2.54.1 or use ros2? I look forward to your reply, thank you.
Please sign in to leave a comment.
Comments
6 comments