need help to integrate slam with D455 using Ros2 humble in raspberrypi 4
I have been trying to obtain the position values from the D455 camera on a Raspberry Pi running ROS 2 Humble distribution, but I haven't been successful so far. I would be very grateful if you could assist me in resolving this issue so that I can retrieve the position values on the Raspberry Pi..
-
Hi Gunjinageswarrao0 You are unlikely to be successful with this goal on a Raspberry Pi 4, unfortunately. When using a RealSnse camera with a Raspberry Pi 4, performance is limited and the best that can be expected is basic raw depth and RGB streams. Also, RealSense IMU motion data is often inaccessible on a Pi 4.
Raspberry Pi 5 has been reported to perform significantly better, if you have the option to change to a Pi 5. I cannot guarantee that you will be able to access IMU information on a Pi 5 though.
-
Hi MartyG,
I'm a friend of Gunjinageswarrao0. Since the Raspberry Pi 4 appears to have limitations with RealSense D455, especially for accessing IMU data and running SLAM effectively, could you please advise what alternative platform would be suitable?
Would using a Jetson Nano be a good option for integrating the D455 with ROS 2 Humble and running SLAM reliably? If not, could you suggest a better alternative that is known to work well with RealSense D455 and ROS 2?
Thanks in advance for your guidance!
In regard to the above comment posted by your friend Allusrikanth87349 (but not displayed) about what platforms other than Pi 4 might be suitable for the project for running SLAM effectively and accessing IMU data, such as Jetson Nano: I agree that Jetson Nano would be a very good, proven choice of alternative single-board computing device that could be used with ROS 2.
A problem area regarding IMU data would be if the Nano's JetPack 6 driver was used, as JP6 can cause the IMU data to not be accessible. There is a workaround to fix this, but I wanted to make you aware of the possibility in advance.
Aside from a Jetson, a Lattepanda board would also be an option to consider.
-
dear sir, MartyX Grover
as you suggested to go for jetson nano we have successfully installed the sdk and ros2 wrapper using foxy.
but we have been getting an error while launching the camera node. i hope for your insights to overcome this error and launch our node successfully.
the error is:
tream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:18,626 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:18,693 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:18,760 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:18,826 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:18,893 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:18,960 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,027 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,093 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,160 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,227 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,293 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,360 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,427 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,494 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,560 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,627 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,694 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,761 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,827 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,894 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:19,961 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,027 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,094 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,161 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,228 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,294 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,361 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,428 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,495 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,561 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,628 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,695 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,761 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,828 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,895 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:20,962 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,029 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,095 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,162 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,228 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,295 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,362 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,429 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,495 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,562 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,629 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,695 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,762 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,829 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,896 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:21,963 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,029 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,096 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,162 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,229 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,296 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,363 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,429 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,496 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,563 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,630 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,696 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,763 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,830 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,896 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:22,963 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,030 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,097 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,163 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,230 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,297 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,363 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,430 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,497 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,564 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,630 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,697 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,764 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,831 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,897 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:23,964 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,031 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,097 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,164 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,231 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,298 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,364 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,431 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,498 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,564 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,631 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,698 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,765 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,831 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,898 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:24,965 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,032 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,098 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,165 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,232 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,298 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,365 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,432 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,498 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,566 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,632 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,699 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,767 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,832 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,899 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:25,966 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,032 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,100 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,167 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,232 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,299 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,366 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,433 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,500 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,566 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,633 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,699 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,766 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,833 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,900 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:26,966 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,033 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,100 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,167 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,233 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,300 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,367 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,433 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,500 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,567 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,634 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,700 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,767 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,834 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,901 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:27,967 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,034 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,101 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,167 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,234 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,301 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,367 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,434 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,501 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,568 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,634 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,701 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,769 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,835 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,902 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:28,968 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,035 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,101 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,168 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,235 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,302 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,368 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,435 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,502 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,568 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,635 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,702 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,769 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,835 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,902 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:29,969 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,036 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,102 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,169 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,236 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,303 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,369 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,436 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,503 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,569 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,636 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,703 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,769 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,836 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,903 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:30,970 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,036 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,103 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,170 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,236 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,303 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,370 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,437 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,503 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,570 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,637 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,704 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,770 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,837 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,904 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:31,970 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,037 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,104 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,171 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,237 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,304 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,371 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,437 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,504 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,571 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
^C[WARNING] [launch]: user interrupted with ctrl-c (SIGINT)
[realsense2_camera_node-1] [INFO] [1747251392.598282531] [rclcpp]: signal_handler(signal_value=2)
[realsense2_camera_node-1] [INFO] [1747251392.599355692] [camera.camera]: Stop Sensor: Depth Module
[realsense2_camera_node-1] [INFO] [1747251392.599426319] [camera.camera]: Close Sensor.
[realsense2_camera_node-1] 14/05 21:36:32,638 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,704 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,771 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,838 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,904 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] 14/05 21:36:32,971 ERROR [547532822944] (synthetic-stream.cpp:58) Exception was thrown during callback: aMalloc failed status:
[realsense2_camera_node-1] [INFO] [1747251393.031310390] [camera.camera]: Close Sensor - Done.
[realsense2_camera_node-1] [INFO] [1747251393.031403622] [camera.camera]: Stop Sensor: RGB Camera
[realsense2_camera_node-1] [INFO] [1747251393.031430134] [camera.camera]: Close Sensor.
[realsense2_camera_node-1] [INFO] [1747251393.054605293] [camera.camera]: Close Sensor - Done.
[INFO] [realsense2_camera_node-1]: process has finished cleanly [pid 9639] -
What version of the RealSense ROS2 wrapper are you using, please? Support for Foxy was removed in wrapper version 4.54.1 onwards. For Foxy, I would recommend SDK 2.51.1 and wrapper 4.51.1.
Version 4.55.1 supports Humble and Iron, while beta version 4.56.1 added support for Jazzy and Rolling for Ubuntu 24.04.
-
Sir, I had previously installed SDK version 2.55.1 and wrapper version 4.54.1. I have now removed them and am trying to install the recommended versions of the SDK and wrapper. However, while installing the SDK using Debian packages (with the help of AI platforms), I encountered an error. Could you please guide me through the correct installation process for both the recommended SDK and wrapper versions?
-
I would not recommend relying on AI generated installation instructions as they often have mistakes.
Installing SDK 2.51.1 and wrapper 4.51.1 will be difficult unfortunately and they will have to be built from source code instead of using DKMS packages.
1. Go to the information page for the 2.51.1 release. At the bottom of the page, in the 'Assets' file list, download the Source code as a compressed zip file. Extract the librealsense folder within the zip file.
https://github.com/IntelRealSense/librealsense/releases/tag/v2.51.1
Then use the RSUSB backend installation instructions to build the source code folder into SDK version 2.51.1 using CMake.
https://github.com/IntelRealSense/librealsense/issues/9931#issuecomment-964289692
-
Here is an example of a guide for building Humble from source on Jetson via ros-humble-desktop.
https://www.forecr.io/blogs/installation/how-to-install-ros-2-humble-hawksbill
-
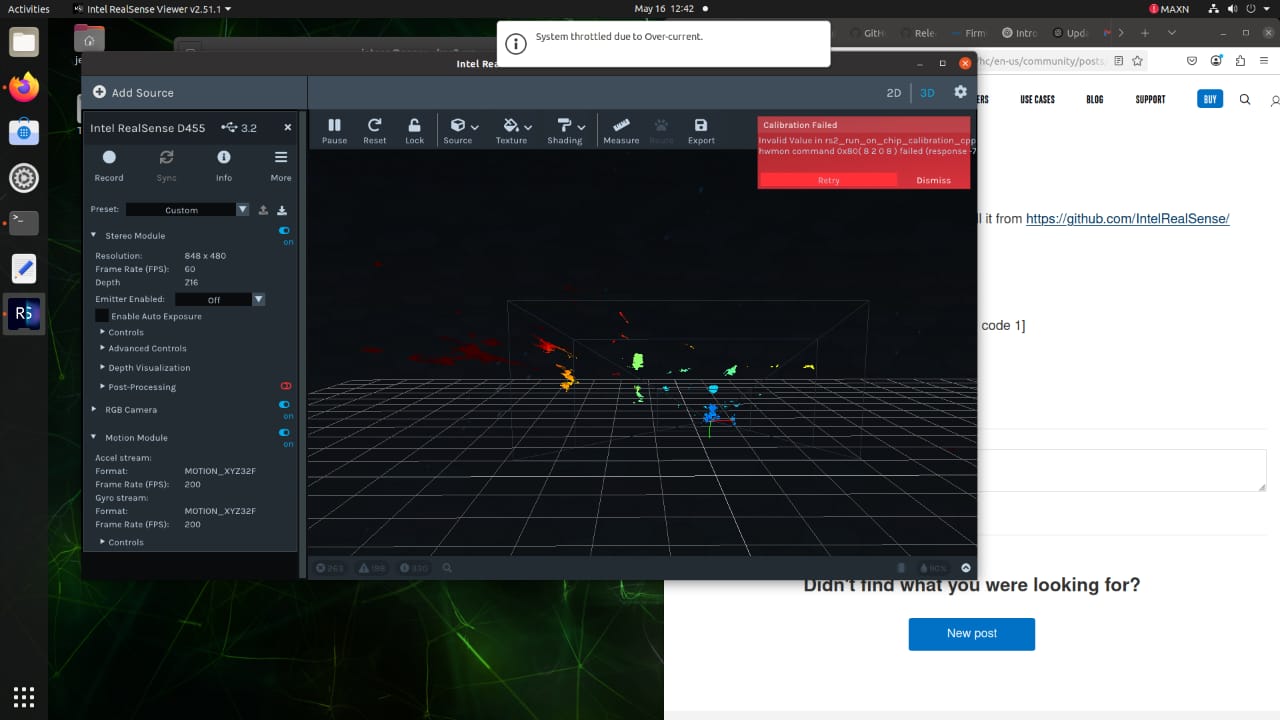
sir it is a partial success as the realsense viewer gave following errors
Invalid Value in rs2\_get\_option(options:0x7f6c0055b0, option\:Auto Gain Limit
Toggle):
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
Invalid Value in rs2\_get\_option(options:0x7f6c0055b0, option\:Auto Gain Limit
Toggle):
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
Invalid Value in rs2\_get\_option(options:0x7f6c0055b0, option\:Auto Gain Limit
Toggle):
hwmon command 0x80( 5 0 0 0 ) failed (response -7= HW not ready)
Timestamp: 1747303150237.940186
Severity: Error
Description: Motion Module failure
after opening the realsense viewer
i thought this sdk will not help us so i removed it.
is it good move. -
The described problem with Auto Gain Limit Toggle is quite easy to fix. It occurs when the camera has a firmware driver version installed that is not recommended for the RealSense SDK / RealSense Viewer version that is being used. If you are using SDK 2.51.1 then the firmware driver version needs to be 5.13.0.50. Installing this firmware should make the Auto Gain Limit Toggle errors disappear.
Firmware 5.13.0.50 is the absolute minimum firmware that supports D455 though, So it is very important that you do not install an older firmware than 5.13.0.50 or the camera will no longer work.
-
But sir i had uninstalled that sdk ,now tell me the compatible sdk.so that i can work effectively with my camera.sir we have been installing and uninstalling these sdk's , wrapper and ros versions from last 7 days .we are working 16 hours daily sir as we have to submit our project in 5 days .but till now we are not able to launch the camera correctly atleast once also. we are a team of two sir this is the main problem we need to take care of everything from localization to object detection for a gps free drone. i hope you could help us in this regard and guide us to the gates of the success sir. we are looking for your response with lots of hope sir.
-
The easiest way forward for you will likely be to forget about using Foxy and old SDK / wrapper versions and instead use the procedure below.
1. Build ROS2 Humble from source code using the guide provided above so that you can use it with Ubuntu 18.04 and JetPack 4.6 on a Jetson Nano.
2. Install the latest version of the librealsense SDK from packages using the command below:
sudo apt install ros-humble-librealsense2*
This installation method will not include the RealSense Viewer in the installation, but the ROS wrapper is not dependent on the Viewer and it sounds as though your project will not need it.
3. Install the latest version of the ROS wrapper from packages using the command below:
sudo apt install ros-humble-realsense2-*
-
Sir, we have tried to install the humble in different ways( including the method you suggested) but none of them get successful. When we tried the method you suggested this is what stopped us.
I hope for your suggestions
shivayya@shivayya-desktop:~$ sudo apt install ros-humble-desktop
Reading package lists... Done
Building dependency tree
Reading state information... Done
E: Unable to locate package ros-humble-desktop
-
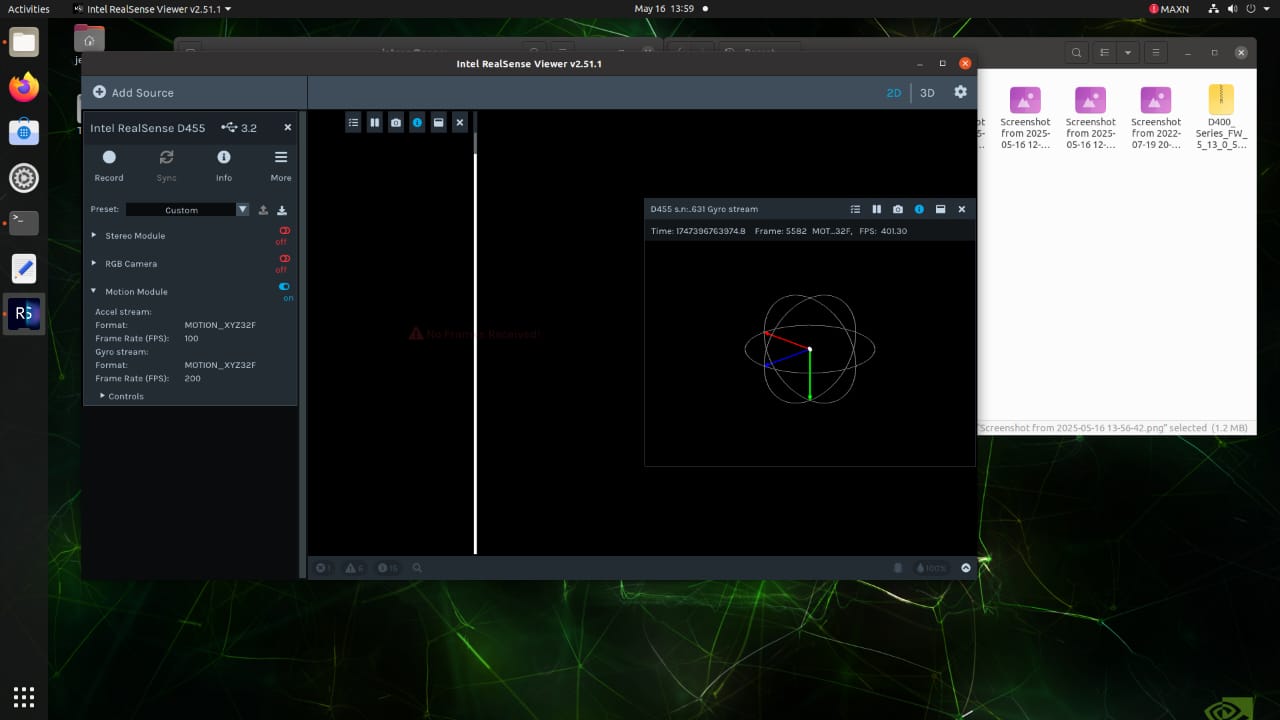
sir,i have installed the sdk version 2.51.1 in my jetson nano (ubuntu 20.04 ,foxy) and downgraded the firmware to 5.13.0.50 from 5.16.0.1 but it doesn't solved the motion module failure issue(showing "frames not recieved" even after changing the frame rate ).Although i tried to install the wrapper (forked version suggested by you )but during the build it is showing like this(suggesting to update the sdk )
jetson@nano:~/ros2_ws$ colcon build --symlink-install
Starting >>> realsense2_camera_msgs
Finished <<< realsense2_camera_msgs [28.8s]
Starting >>> realsense2_camera
Starting >>> realsense2_description
Finished <<< realsense2_description [3.99s]
--- stderr: realsense2_camera
CMake Warning at CMakeLists.txt:119 (find_package):
Could not find a configuration file for package "realsense2" that is
compatible with requested version "2.54.1".The following configuration files were considered but not accepted:
/usr/local/lib/cmake/realsense2/realsense2Config.cmake, version: 2.51.1
CMake Error at CMakeLists.txt:121 (message):
Intel RealSense SDK 2.0 is missing, please install it from https://github.com/IntelRealSense/librealsense/releases
---
Failed <<< realsense2_camera [8.30s, exited with code 1]Summary: 2 packages finished [38.6s]
1 package failed: realsense2_camera
1 package had stderr output: realsense2_camera -
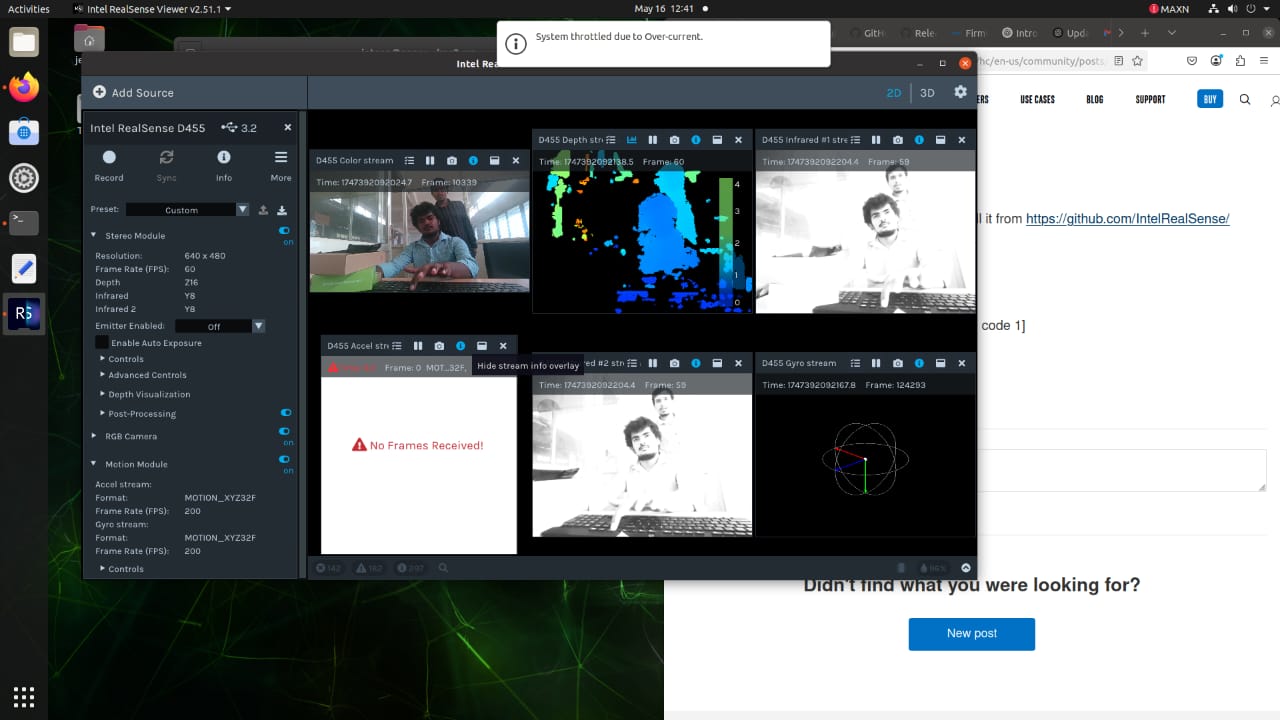
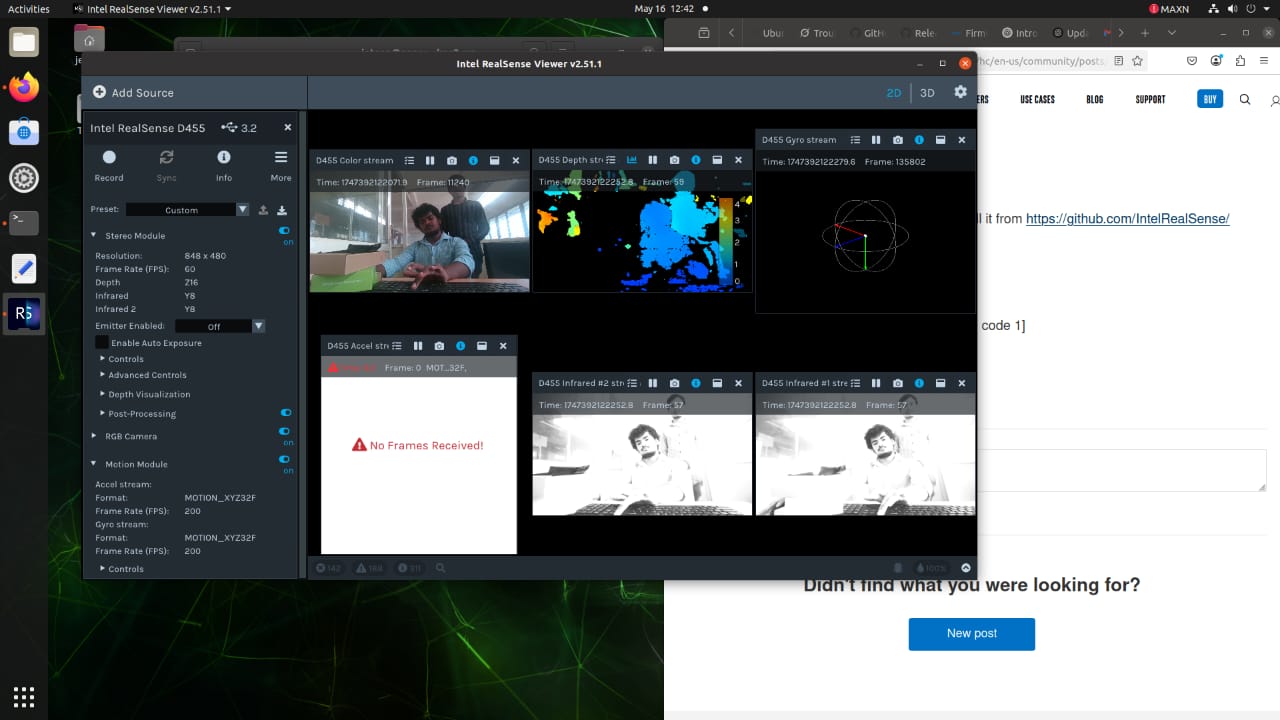
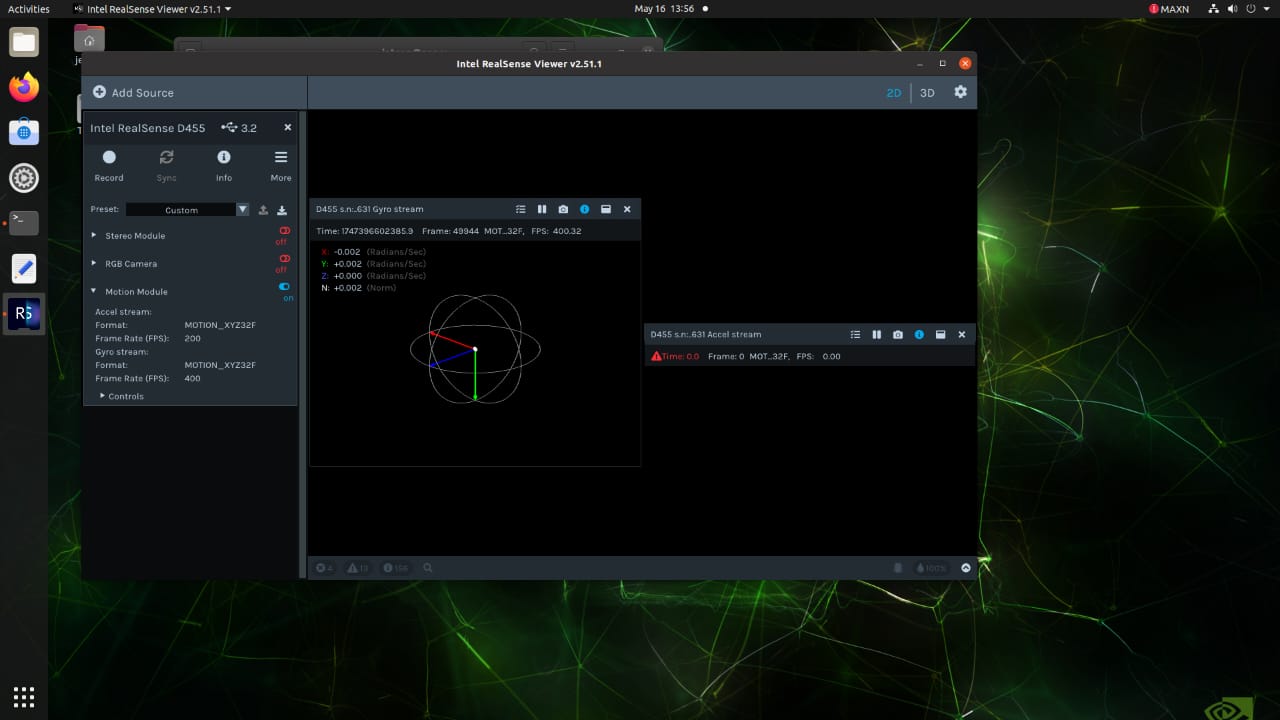
Sir after installing the wrapper version 4.51.1 with 2.51.1 SDK .We got the below outputs .in the realsense viewer, there we are unable to get gyroscope values. and we were able to see the camera feed in the rviz also.
kindly look into this issue sir and help us in setting up the camera for further uses.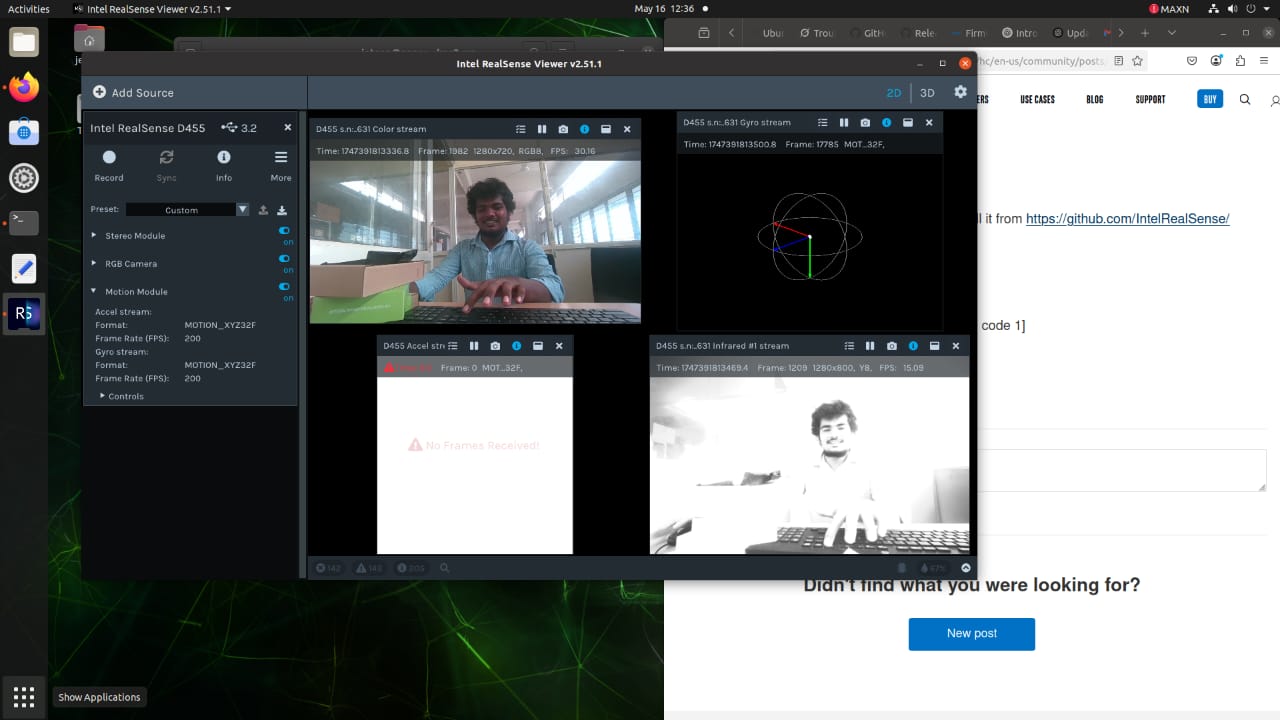
-
Regarding this message generated by the forked 4.54.1 wrapper:
Could not find a configuration file for package "realsense2" that is compatible with requested version "2.54.1".
The 4.54.1 wrapper is meant to be used with SDK version 2.54.1, but you currently have the older 2.51.1 SDK version installed.
The most important task right now is, I believe, to get the SDK (and RealSense Viewer) stable and working. This will provide a good foundation for then attempting to install the ROS wrapper and get it working successfully on your Nano.
This time, let's wipe the Nano again and reinstall Ubuntu 20.04. Then install the SDK on the Nano using the libuvc backend installation method.
1. Visit the JetsonHacks page about installing RealSense on Jetson Nano.
https://github.com/JetsonHacksNano/installLibrealsense
2. Input the command below, which will install the SDK and RealSense Viewer from special Jetson-compatible packages.
./installLibrealsense.sh3. Test whether the Motion Module is working correctly in RealSense Viewer.
-
During our discussion we have not mentioned the USB cable. Are you using the official 1 meter cable supplied with the camera or another cable of your own choice, please?
Could you try unplugging the micro-sized end of the USB cable from the base of the D455 camera, reversing the connector's orientation and plugging it back into the camera, please (USB-C cables are two-way insertion at the micro-sized end). Does inserting the connector the other way around make any difference?


Please sign in to leave a comment.
Comments
37 comments