Accuracy with sunlight noise
I used 2 D435 cameras in a outdoor application (between 2~4 m), but a lot of wavy noise was detected. So, i did some captures comparing indoor scene and indoor scene with sunlight (to simulate a outdoor scene).
without noise:
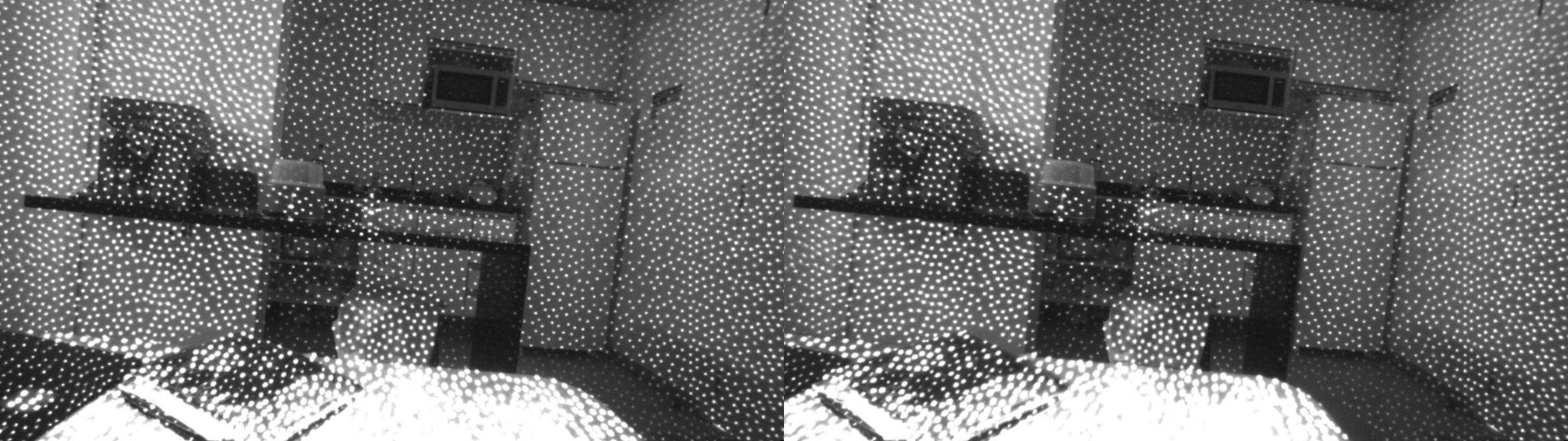
with noise:

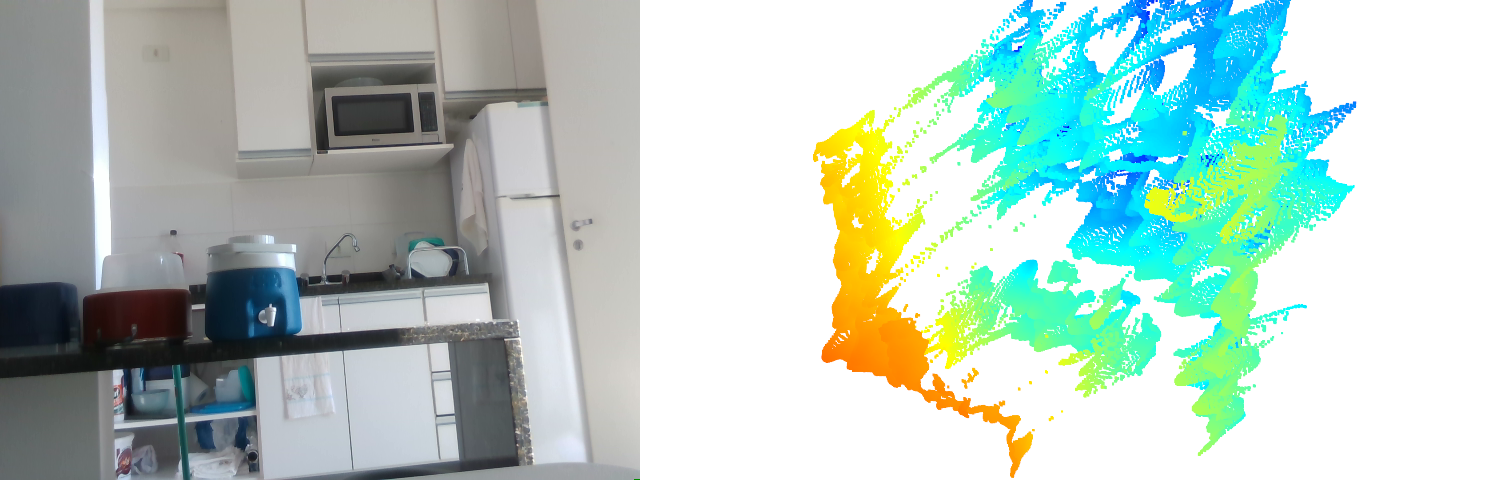
closed door scene:

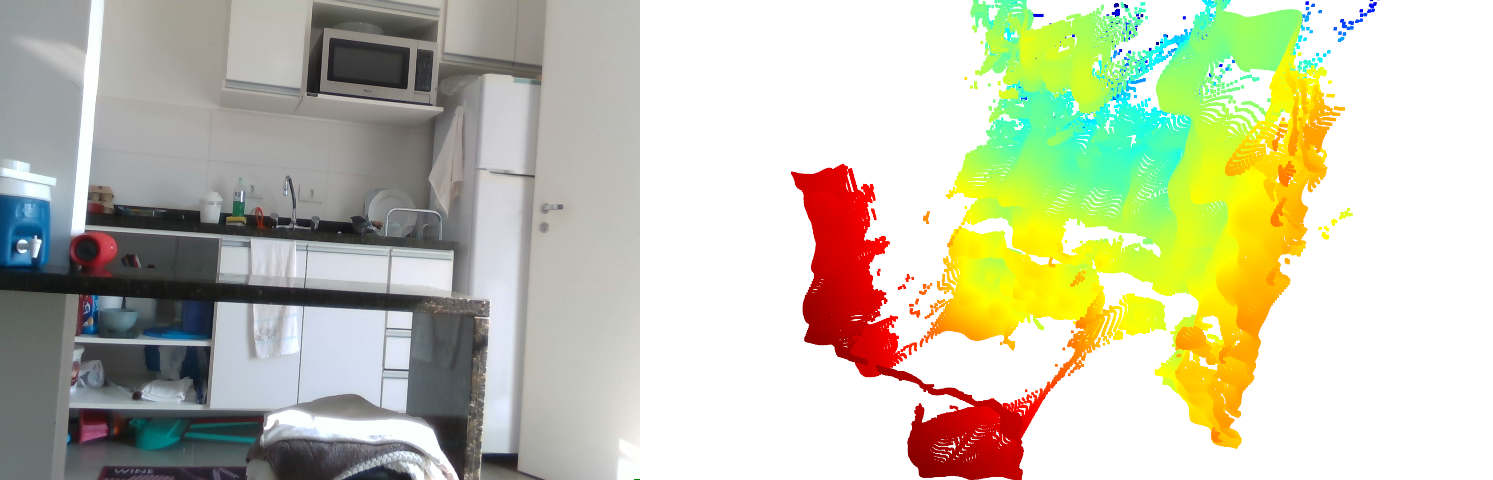
opened door scene:
opened door scene (but with decimation, spatial, temporal, hole filling filters):
I do understand that stereo matching is improved when the IR pattern is projected on a surface, however, when noise is applied the result is very wavy, even with filters. I would like to know if there is a way to improve these results.
-
Hi Vinicius Ramalho There can be different forms of the ghost noise phenomenon. For your particular case, I would first recommend reading the discussion in the link below.
https://github.com/IntelRealSense/librealsense/issues/4553
There is a list of "further reading" links to ghost noise-related cases at the bottom of that discussion.
-
Thanks for responding MartyG. I did run the calibration tool (Not the dynamic calibration) and it said that the calibration was good, i'll try the dynamic calibration tool as well as changing the depth step-size by changing the depth unit as suggested https://dev.intelrealsense.com/docs/tuning-depth-cameras-for-best-performance. However, i still think that the IR noise from sunlight will have a large influence in the result especially in textureless regions, and maybe, a external projector (with a higher power output) would be the best approach (also suggested in here: https://dev.intelrealsense.com/docs/tuning-depth-cameras-for-best-performance). Did anybody already did something like this? (using a external projetor)
-
Intel has a white-paper document about using projectors that provides information about selecting and using external projectors.
Please sign in to leave a comment.
Comments
3 comments