The best possible depth-result of D435i for an object at a distance of about 50cm?
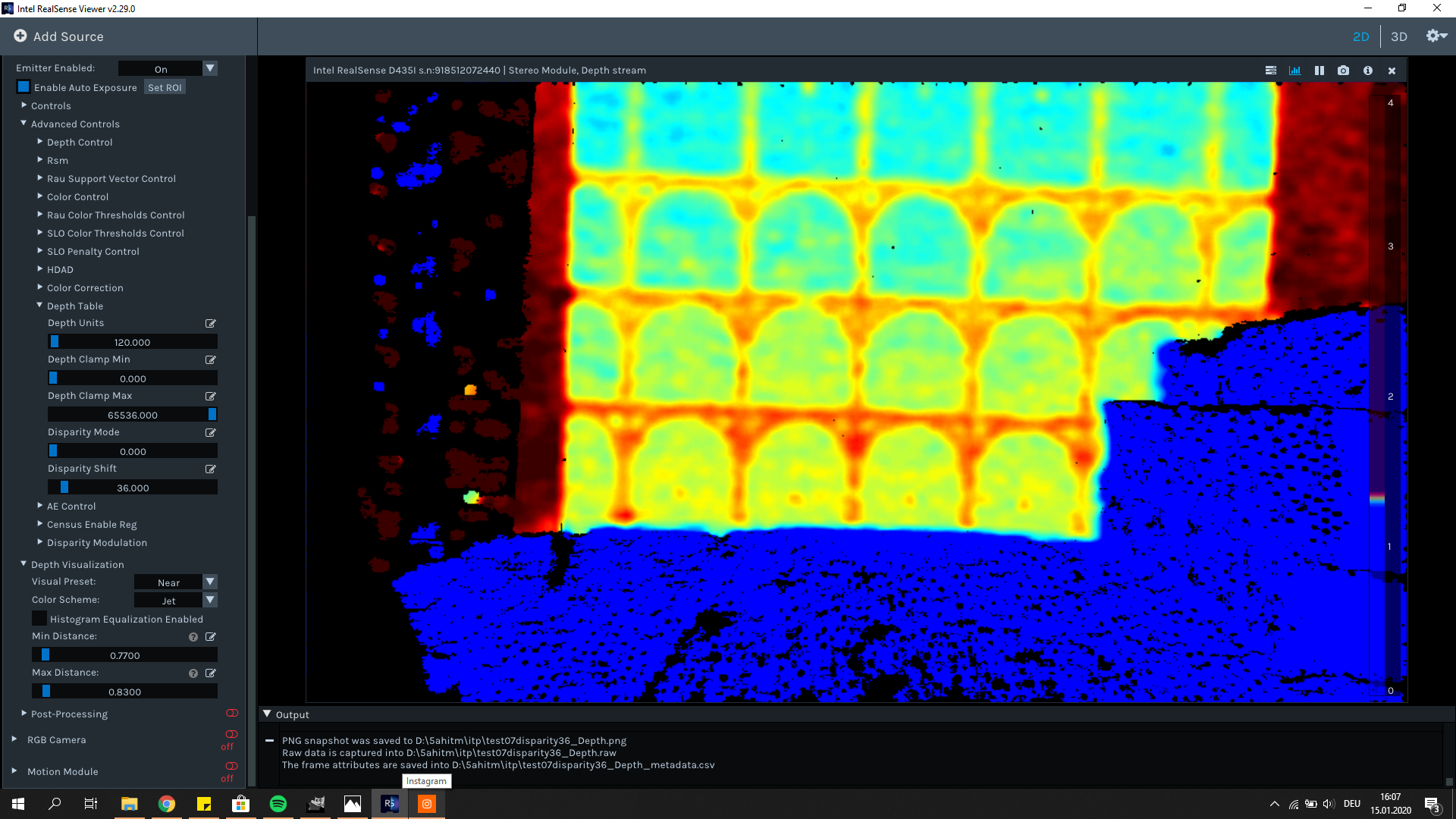
The object of interest is a concrete slab 40x60x2cm. I would get the best possible depth information for the cutouts on the slab. So I am only interested in depth values of pixel located 50 to 53 cm in front of the camera. As you can see, the color map ruler of the viewer tells me, that the values of the interesting distances are very close to each other and only cover a very small piece of the full range.
My question, what are the parameters (minz, maxz, disparity shift, depth units - there are two different input fields!, ...) to change to possibly improve the depth information?

-
When using the camera at very close range to an object, reducing the depth unit value can improve accuracy.
On the 400 Series cameras, the default depth unit value (the one under the Controls option category) is 0.001 and can be reduced to 0.0001. Dorodnic the RealSense SDK Manager recently said that it is possible to change this value in software to support a lower depth unit scale and are looking at doing so in an upcoming release.
Increasing the disparity shift value reduces the minimum distance of the camera from an object (MinZ), allowing it to get closer to an object before the image starts to break up as the camera passes below minimum distance. The trade-off is that the maximum observable distance of the camera (MaxZ) reduces. At very close range though, a modest reduction in maximum distance is not likely to have much impact on the image.
An alternative to disparity shift for controlling minimum and maximum observation distance is to define a "depth clamp" using the MinZ and MaxZ values.
-
MartyG So can we use D435i camera under the Minimum Depth Distance (Min-Z): 0.105 m? I want to scan smaller objects at very close distances(3-10 cm)
-
Hi Isoakbudak You can reduce the minimum distance further by increasing the value of a setting called Disparity Shift. This also reduces the maximum distance, though this will not matter much when using the camera at very close range.
The Chief Technical Officer of the RealSense Group at Intel (agrunnet) also recently commented on using D435 to scan at 6 cm.
Please sign in to leave a comment.
Comments
3 comments