About the camera connection issue on ROS
Hi Intel Support,
I've a problem that about D435i load the log files to connect PC on ROS.
I use the launch file to test the camera connection from the below address. (rs_camera.launch)
git clone b 2.2.7 https://github.com/IntelRealSense/realsense ros.git
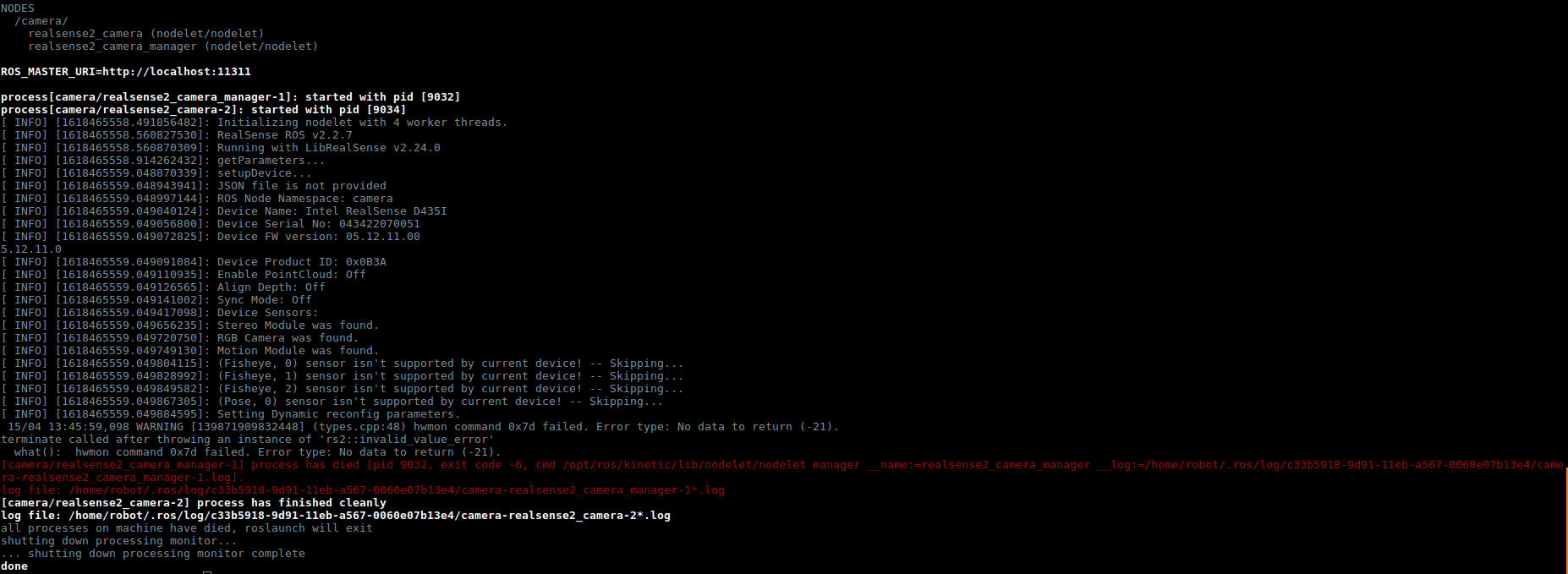
At my testing, I detect the camera connection failure.
The connection failure figure
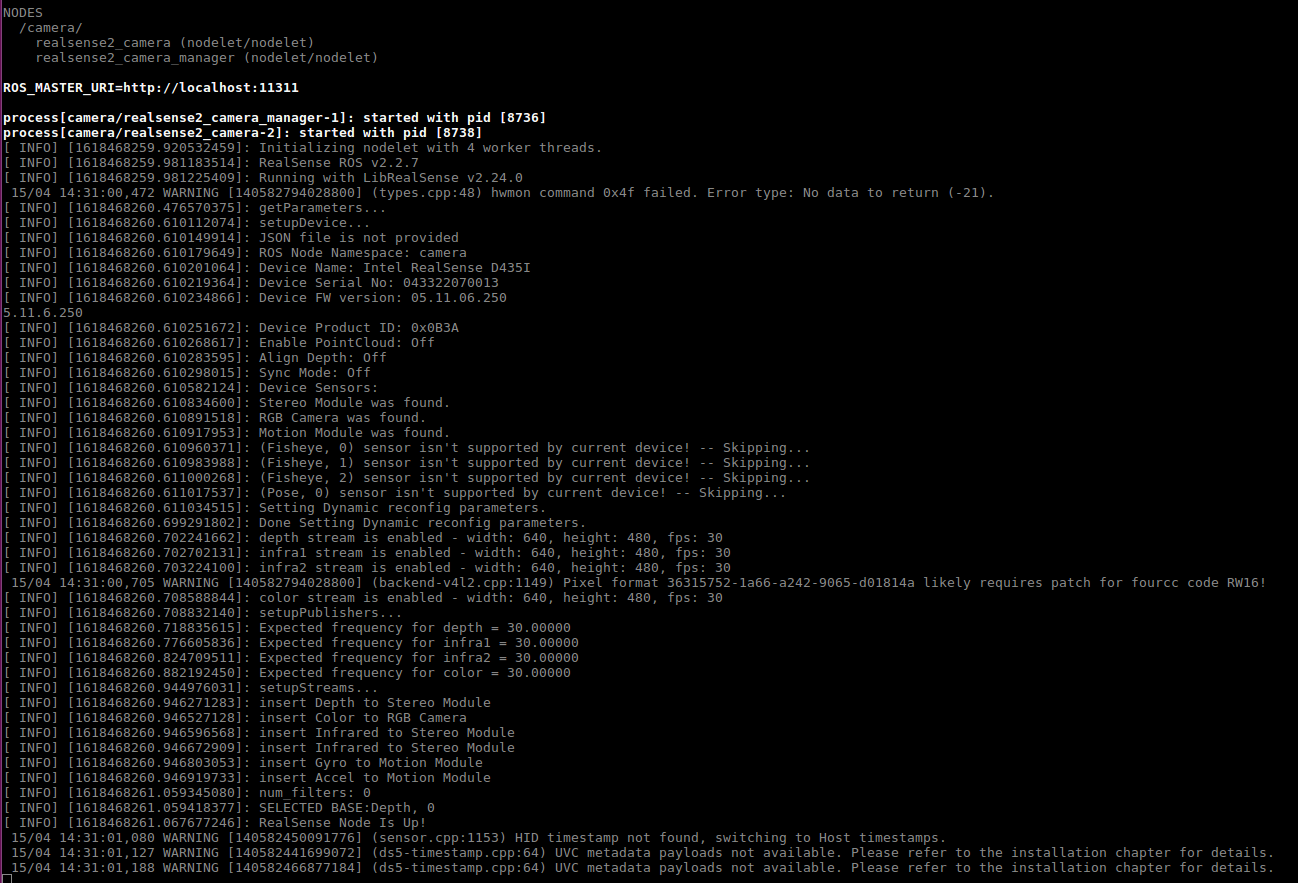
The connection success figure
Can this condition use the resetting camera parameter to resolve the problem?
Could you have any solution to resolve it?
Many thanks
-
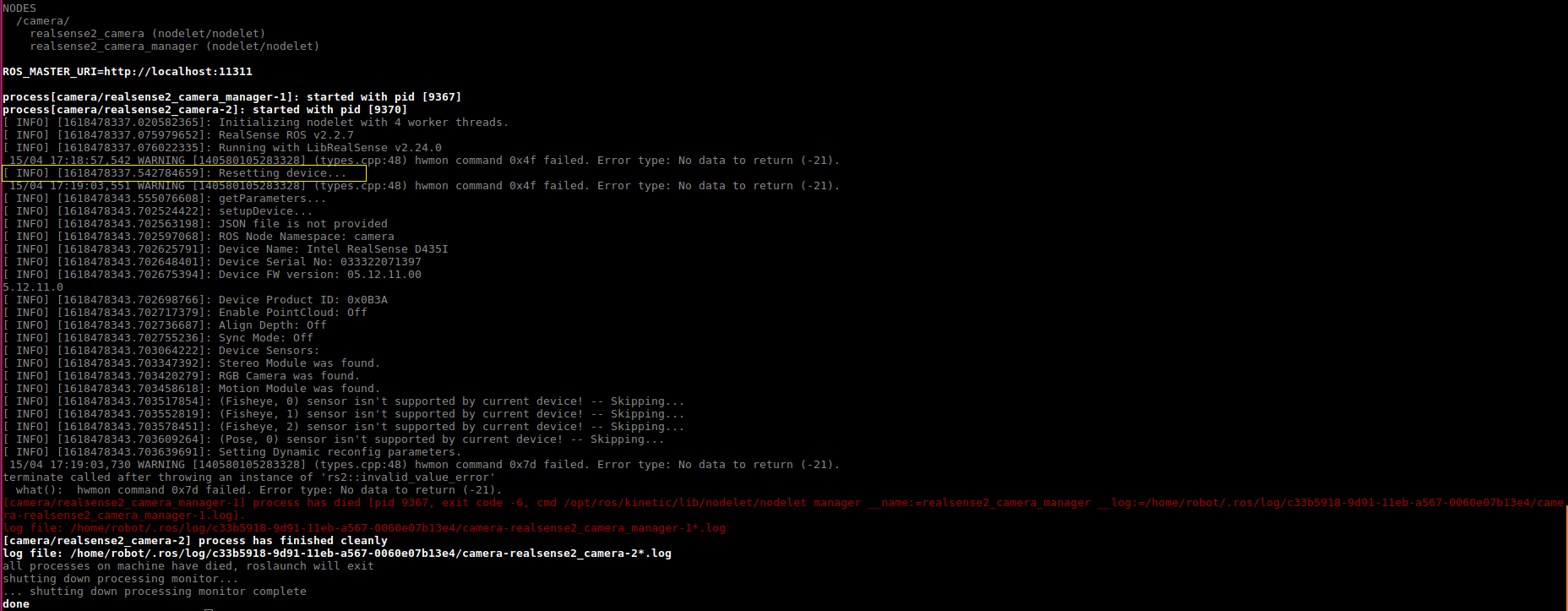
Hi Getomboy The initial_reset instruction is a launch command that resets the camera at launch and can be activated from the roslaunch instruction or defined in the launch file.
If the camera is able to be detected successfully during a launch but it is not launching succesfully every time then there is certainly no harm in including an initial_reset instruction in the launch configuration to see whether it increases your launch reliability further.
-
Your RealSense ROS wrapper installation is likely okay if it is able to launch successfully. It is just a matter of increasing the reliability of launch. Please try launching with the roslaunch instruction and adding this command to the end of your roslaunch instruction:
initial_reset:=true
For example:
roslaunch realsense2_camera rs_camera.launch initial_reset:=true
-
The librealsense SDK and ROS wrapper versions that you are using are very old (from mid 2019). Would it be possible to update your SDK and wrapper to modern versions (SDK 2.43.0 and wrapper 2.2.23) as they still support Ubuntu 16.04.
librealsense 2.43.0
https://github.com/IntelRealSense/librealsense/releases/tag/v2.43.0
ROS wrapper 2.2.23
https://github.com/IntelRealSense/realsense-ros/releases/tag/2.2.23
If it is not possible to change your versions then I would suggest looking at the camera firmware instead. The firmware 5.12.11.0 that the log says is installed in your camera is recommended for the modern librealsense version 2.41.0
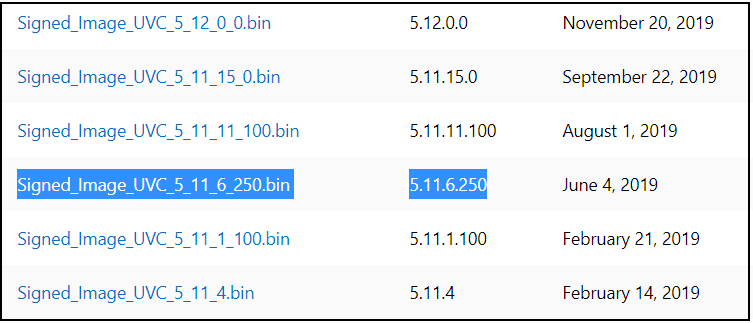
The firmware version that is recommended for SDK 2.24.0 is 5.11.6.250 and is available from the firmware releases page.
https://dev.intelrealsense.com/docs/firmware-releases
Overall though, my recommendation would be to update your project computer to a modern RealSense setup if it is possible for your project:
SDK 2.43.0
ROS wrapper 2.2.23
Firmware driver 5.12.12.100
Please sign in to leave a comment.
Comments
5 comments