How to use accel and gyro arrays to calculate angle between camera and object ?
I am planning to create a custom using an Intel Realsense D435i camera for medical surgery. This includes the D435i camera which will be static after registration of the horizontal and vertical planes. Once registration is done, we will detect the aruco marker attached to the medical rod and we aim to find the angle of the moving rod from the camera.
The setup seems to look like this: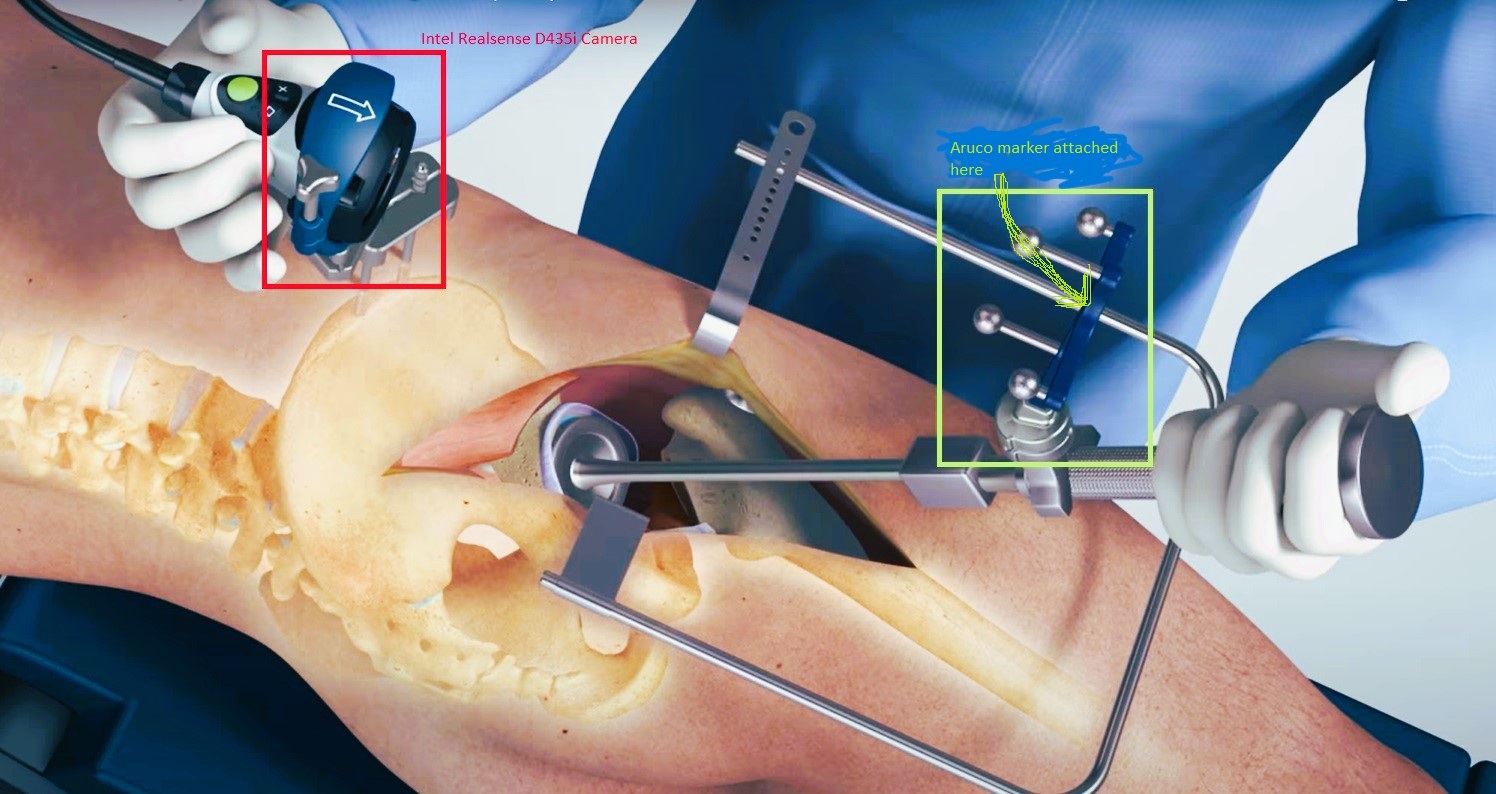
I have a NumPy array of x,y, and z of accel and gyro data. How can I use D435i to find the angle of that moving rod with respect to the camera using this data?
-
Hi Parth Sankhavara29 The discussion at the link below suggests methods for calculating an angle from depth information instead of using the IMU.
https://github.com/IntelRealSense/librealsense/issues/5553
Alternatively, if your project requires use of an ArUco marker and is able to make use of ROS then the RealSense project at the link below can use a marker to find the TF of the marker as X, Y and Yaw.
Please sign in to leave a comment.
Comments
1 comment