[D455]Stairs detection and measurement
Hi,I am new to computer vision. I want to use a D455 to detection stairs and calculate the size of each step (height, long and width).I have tried measuring distance and depth with realsense-viewer, measure and hello-realsense and the measurements are fine.
Now I want to use Python to mark the stairs and give the size of each step in camera image.Is there any documents or projects for me to refer to?
Thanks.
-
Hello,
A robot product at the link below that is equipped with 4 RealSense cameras implemented handling of stairs by placing a camera between the legs of the robot.
https://twitter.com/agilityrobotics/status/1100477143241216000?lang=en
A simple approach to measuring stair height may be to measure the distance at the center of the camera's field of view and subtract the known distance between the camera lenses and the base of the equipment that the camera is mounted to. The remainder of the detected distance should be the distance to the top of the step that the camera is currently positioned above. This approach will only calculate one step at a time though.
For calculating multiple stair steps simultaneously, a deep learning based solution may be required. Such a tool can look at an image and automatically pick out and analyze all the occurrences of a particular element of the scene that it has been trained to recognize.
Some researchers have used point cloud data from a tool called PointNet for stair detection.
http://stanford.edu/~rqi/pointnet/
https://github.com/charlesq34/pointnet
An example of a stair detection project that used Python and PointNet is here:
https://ieeexplore.ieee.org/stamp/stamp.jsp?arnumber=9782312
-
Hi MartyG,
Thank you for your reply.
Now, I want to use point cloud of each side of the stair to measeure the size of the stair by calculating the length of each direction, e.g. maxY-minY. Is there any solution to detect and divide each side of the stair? I have tried a project with region growing but it cannot detect in real time (normally 30 fps but reduced to <10 fps when stairs are detected). Can you give me some advice?
Thanks.
-
Would measuring between two points instead of between the camera and a point meet your requirements? The link below has an example of such a script for Python.
https://github.com/soarwing52/RealsensePython/blob/master/separate%20functions/measure_new.py
This script was originally a conversion of the RealSense SDK's rs-measure C++ measuring example.
https://github.com/IntelRealSense/librealsense/tree/master/examples/measure
The Python measuring script was later used as part of a larger project to measure between the two far sides of a road, similar to the opposite ends of a stair step.
-
Hi MartyG,
Thanks to your help, I have achieved the detection and measurement of stairs.
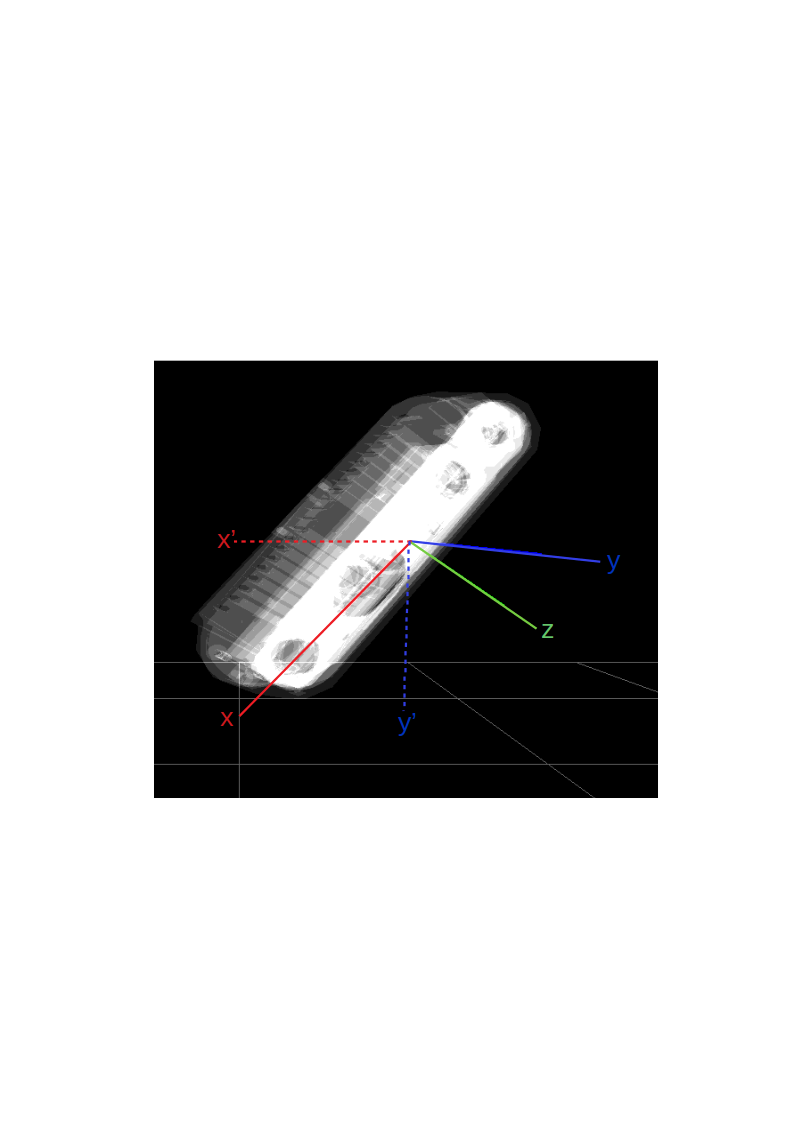
Now I want to know if I can use imu data to transform the coordinates of the point cloud.
Just like the image below, when the camera is not horizontal, I want to change the coordinates of the point cloud from xyz to x'y'z ( from a camera based xy coordinates to a ground based x'y' coordinates).
Thanks.
-
You could perhaps monitor the IMU's roll and pitch angles (tilt left-right and up-down respectively) and if the angles are a certain amount away from the straight-ahead and flat position, adjust the coordinates. A Python discussion at the link below looks at how yaw and pitch values might be retrieved.
https://github.com/IntelRealSense/librealsense/issues/4391
In regard to transforming between the camera's 0,0 xy and a custom 0,0 xy position, a RealSense user at the link below did so by doing a subtraction sum of the camera xy - their offset position's xy.
Please sign in to leave a comment.
Comments
5 comments