Enable infrared stream
Hi,
In my application I need both depth stream and the left infrared stream. In my opinion, since the depth stream is generated based on both the left and right infrared streams, so once I enable the depth stream in the pipeline configuration, does this mean the left stream is enabled automatically.
In another word, if I only enable the depth stream as follows
config.enableStream(StreamType.DEPTH, DEPTH_STREAM_WIDTH, DEPTH_STREAM_HEIGHT);
can I access the infrared stream?
Thanks.
Yixun
-
Hi Yixun Liu If you enable the infrared stream without providing an index number to distinguish between the left and right streams then the left stream will be used by default.
The left infrared stream is not enabled automatically when depth is enabled and needs to be enabled separately. For example:
config.enableStream(StreamType.DEPTH, 640, 480,StreamFormat.Z16);
config.enableStream(StreamType.INFRARED, 640, 480,StreamFormat.Y8, 30);The depth stream is not generated from the Infrared and Infrared 2 streams, but instead from raw left and right infrared frames in the camera hardware. This is why depth can be streamed when the Infrared and Infrared 2 streams are disabled.
-
I am a little bit confused about what's the difference between the raw left infrared and the non-raw infrared stream?
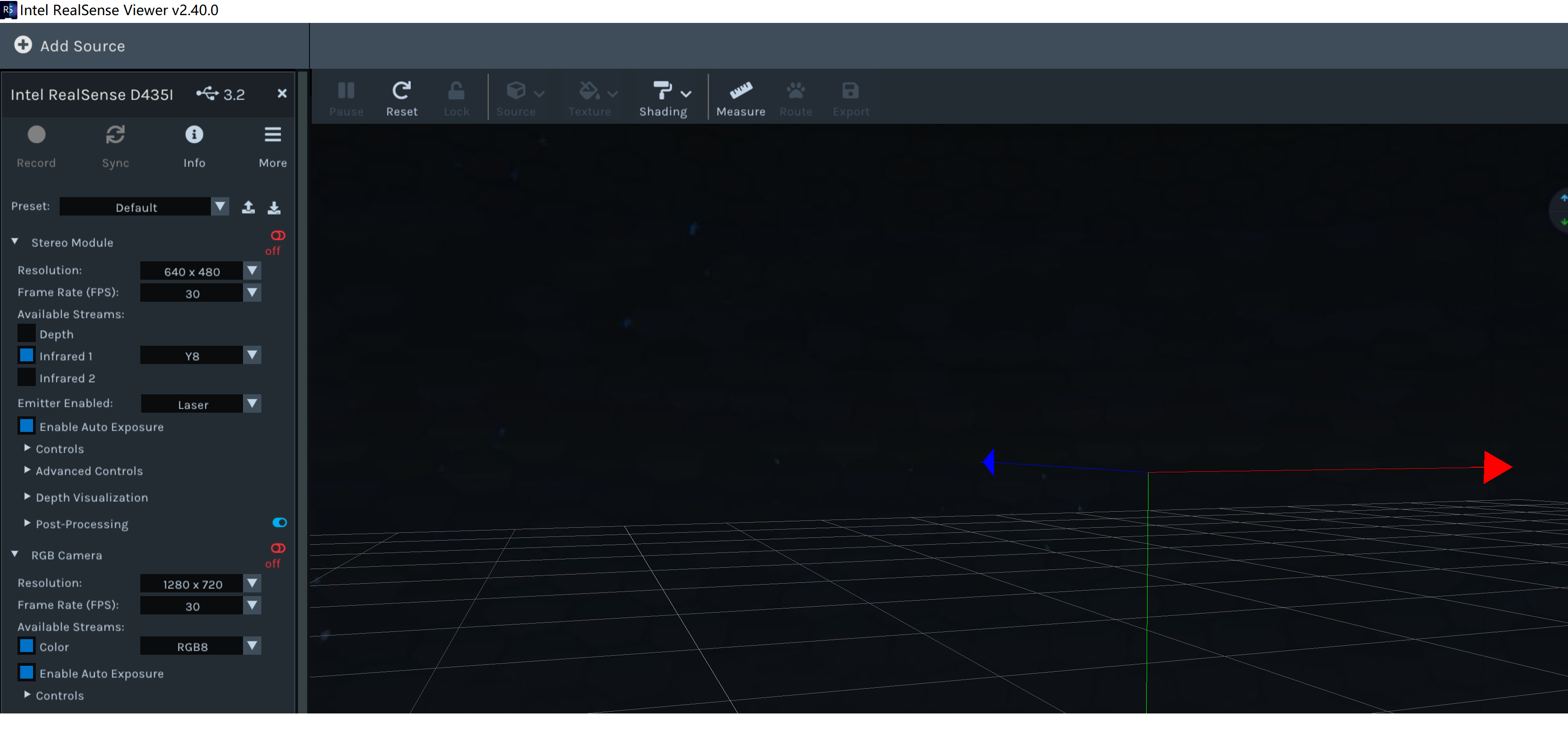
In the Intel Realsense Viewer, I tried to see the left infrared stream with the configuration as below. As I click the "off" button near the stereo module, actually enable the visualization of the left infrared stream, but nothing shown. If I check the depth stream checkbox, I can see the stream, but not the infrared stream.
-
Raw frames are the original ones generated at the point of capture (the camera) before they undergo processing such as having a distortion model applied by the camera hardware and are then sent along the USB cable to the computer. Information about distortion models can be found at the link below.
https://dev.intelrealsense.com/docs/projection-in-intel-realsense-sdk-20#distortion-models
In the above image of the RealSense Viewer you are in 3D pointcloud mode. Please left-click on the '2D' option in the top corner of the Viewer window to view the infrared streams when they are enabled.
-
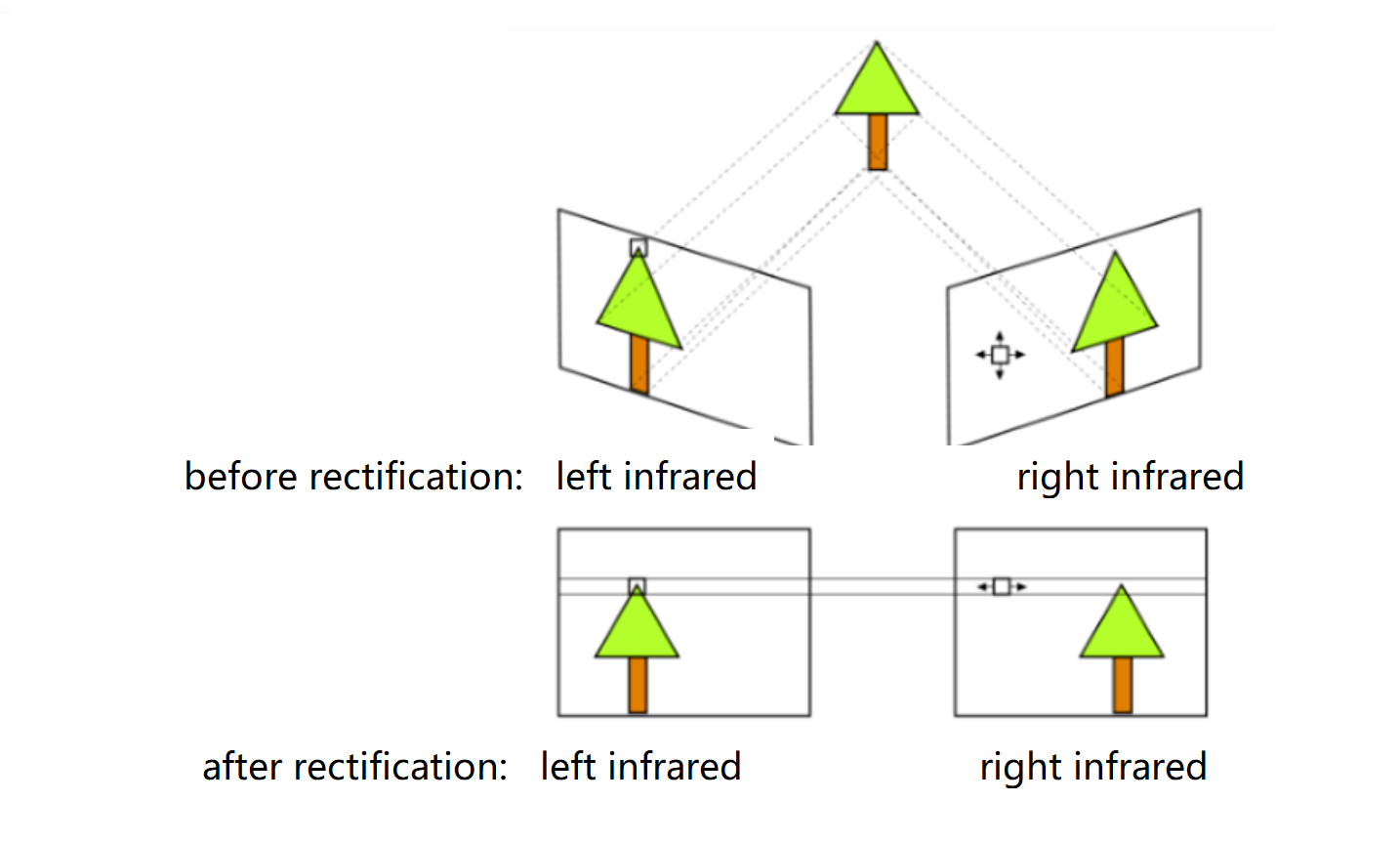
Since the left infrared and right infrared are undistorted and stereo rectified streams, I want to know the extrinsic transform between the color sensor and the left infrared obtained by the command "rs-enumerate-devices -c" is between the color sensor and the original left infrared sensor or between the color sensor and the stereo rectified left infrared sensor? Please see the following picture.
-
rs-enumerate-devices -c provides extrinsics transforms for both directions (color to infrared, and infrared to color). For example, the values below are from a D455.
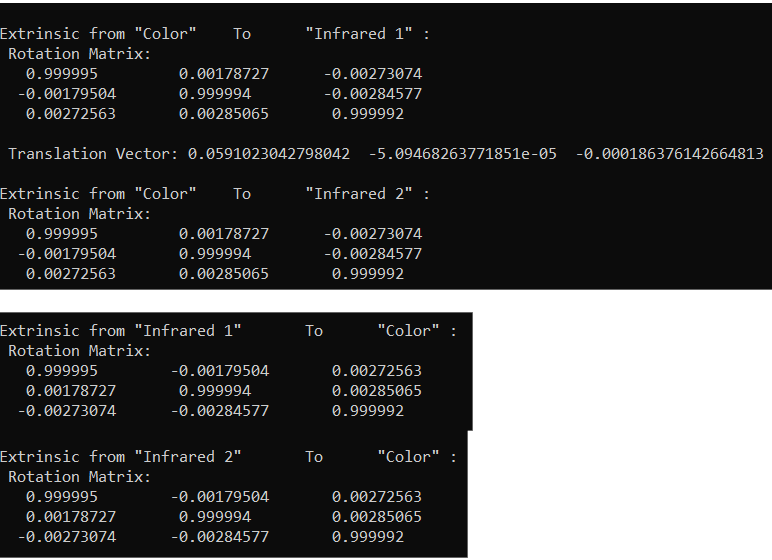
As the calibration information is based on stream profiles, the information will relate to the Infrared streams and not the original raw infrared images.
The Y8 infrared stream format is rectified, whilst the Y16 infrared stream format is unrectified as it is used for camera calibration.
Please sign in to leave a comment.
Comments
6 comments