Question about FoV geometry
Hello RealSense community,
I have a question regarding the FoV geometry of the RealSense D456.
Specifically, I would like to understand where in 3D space valid depth data is measured.
According to the datasheet, the invalid depth band is described, but I am looking for clarification on how this relates to the actual region in 3D space in which valid depth measurements can be obtained.
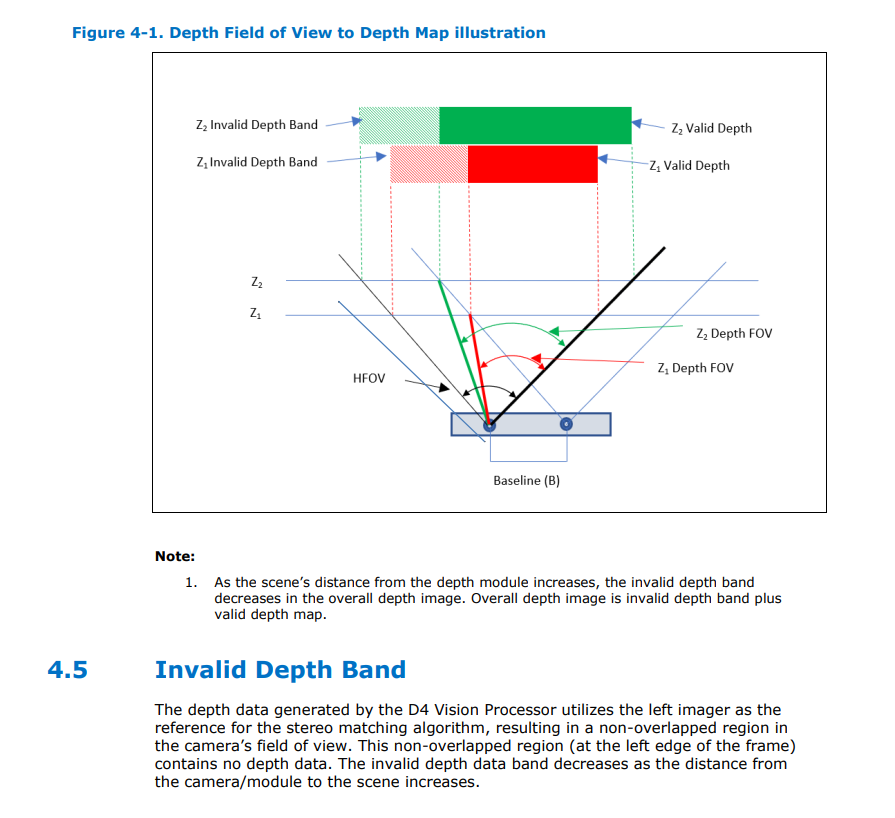 According to the invalid depth band, depth data can be measured, when the left and right imager are overlapped.
According to the invalid depth band, depth data can be measured, when the left and right imager are overlapped.
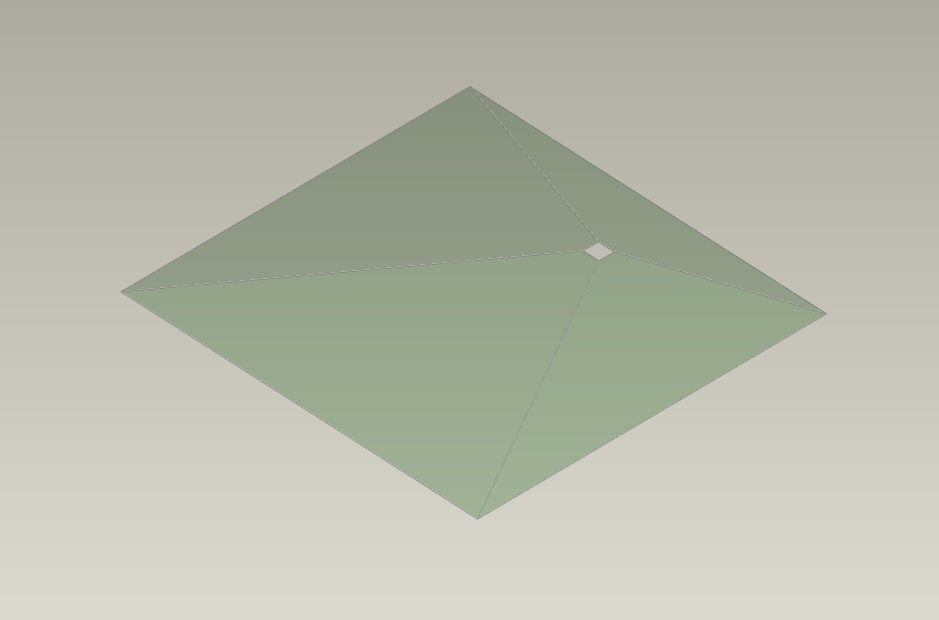
So how does that look in 3D space? If I consider only the overlapping region of both sensors, I end up with a field of view similar to the red area shown in this CAD screenshot: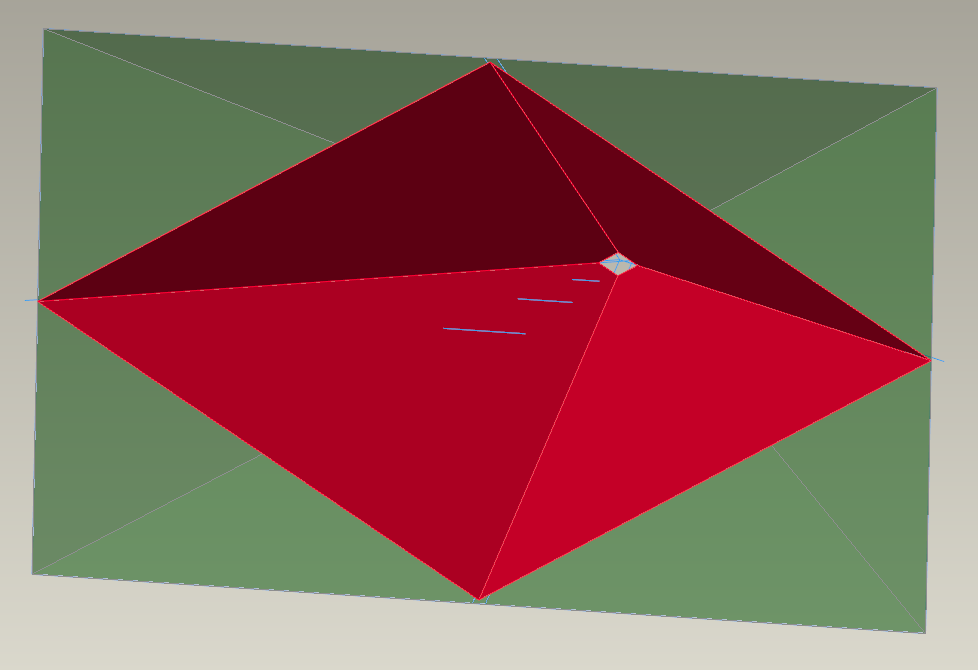
I am not sure whether this actually represents the region in which the RealSense D456 can measure valid depth.
Is there any documentation that provides clarification on this?
Thank you!
Best regards,
Laurin
-
Hi Laurin Steiner I would recommend not attempting to calculate your own FOV diagram or considering the invalid depth band due to the complexities involved. It is much easier to work out the depth image's overall field of view by looking up its FOV value. On the D456 it is 87 degrees wide (horizontal) and 58 degrees vertical (tall).
The depth image has its 0,0,0 origin at the centre-line of the left IR sensor, which is the sensor on the right-hand side of the camera when looking at it from the front.
-
Hello Marty Grover,
Thank you for your response!
I assume that the valid depth data in 3D space can then be measured using a geometry like this: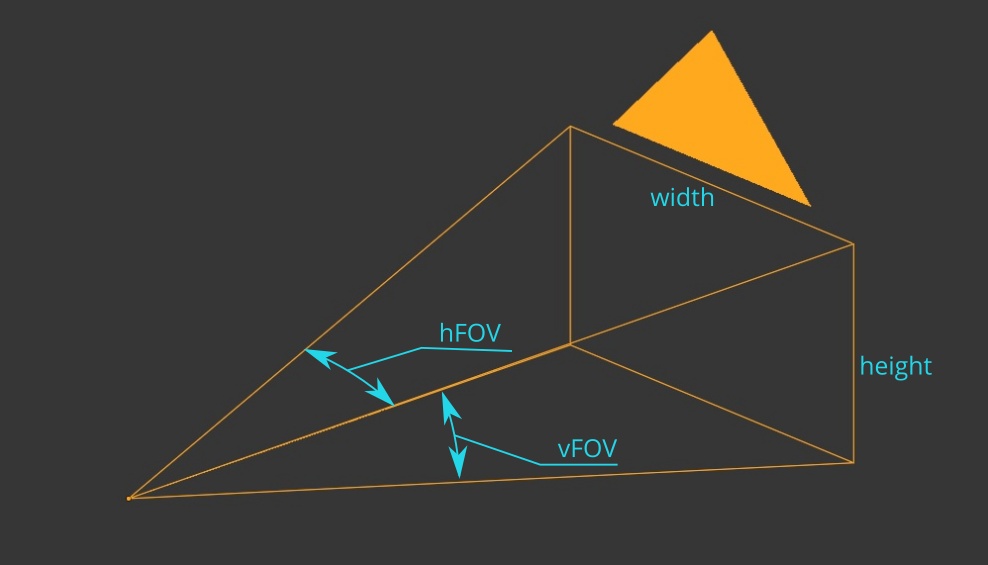
As a conclusion, the valid depth-data field of view has the same geometry as each IR camera imager.
Since this is a very important topic, I need confirmation regarding which depth-FoV geometry I can rely on. Based on your explanation, it would be the first option, correct?
1. First option depth-FoV-geometry
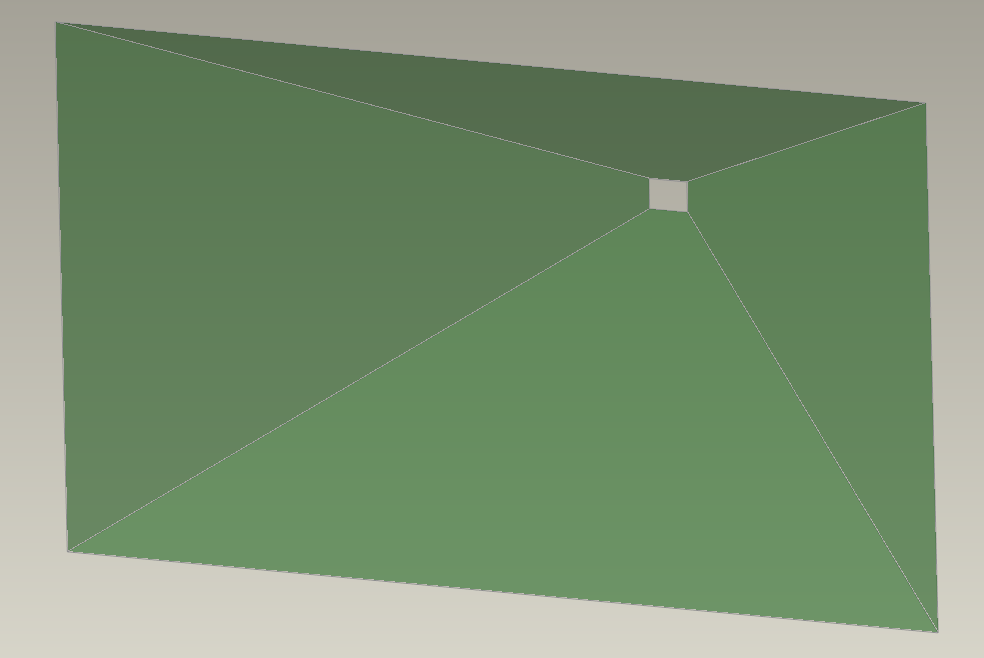
1. Second option depth-FoV-geometry
Thank you very much.
Best Regards
Laurin -
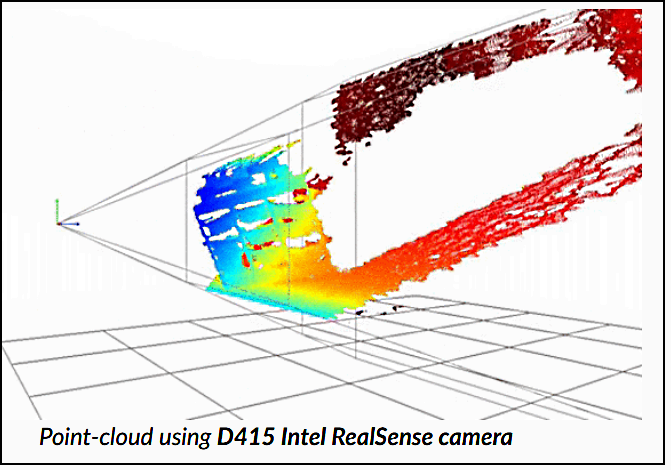
I located a reference which has an example of a diagram of the depth FOV triangle whose origin is the left-side IR sensor.
https://github.com/realsenseai/librealsense/issues/2355#issuecomment-418712557
The shape of the FOV shown in the diagram is for the D415 model rather than D456 but gives you a confirmation of the general triangular shape of a RealSense depth FOV viewpoint. I would say that it most closely resembles your Option 1.
The guide at the link below provides another example diagram of the RealSense depth FOV.
https://docs.ros.org/en/iron/p/librealsense2/user_docs/depth-from-stereo.html
Please sign in to leave a comment.
Comments
4 comments