Depth Measurements and Accuracy
I'm using the D455 camera and have some specific questions about the depth being reported for each pixel and the accuracy of those values.
Are each pixel independently calculated or do some of the pixels get interpolated?
The specification of the D455 is for operation up to 10m. Depth accuracy reported in Table 4-9 is specified up to 4 meters. Can Intel provide the accuracy of the depth measurements for the full operating range?
I understand that the operating range for the D455 is 0 - 35 C. Can Intel summarize specify the degradation of accuracy and the depth measurements when outside of these parameters? (i.e. -10 to +60C)
-
Hi Joe Cely Information about the calculation of separate pixel coordinates is provided in the RealSense SDK's Projection documentation at the link below.
https://dev.intelrealsense.com/docs/projection-in-intel-realsense-sdk-20#section-pixel-coordinates
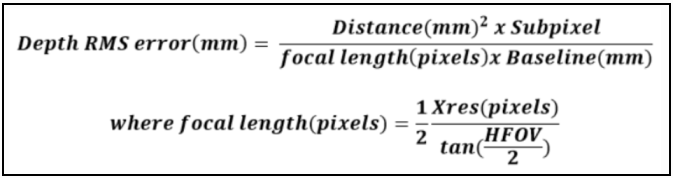
You can plot error over distance (RMS Error) using a formula from the section of Intel's 400 Series camera tuning guide linked to below.
I am not aware of specific guidance about how a depth image will be affected when the camera's temperature is outside of recommended ranges. In general though, the 400 Series camera firmware driver contains a laser safety mechanism that shuts off the laser if the detected temperature is > 60 or < 0 degrees C for a period longer than several seconds. The camera can continue to operate if the laser is shut off, though depth image quality may reduce.
Please sign in to leave a comment.
Comments
1 comment