Precise measuring the object volume (Spatial resolution issue)
Hello everybody, hello MartyX Grover
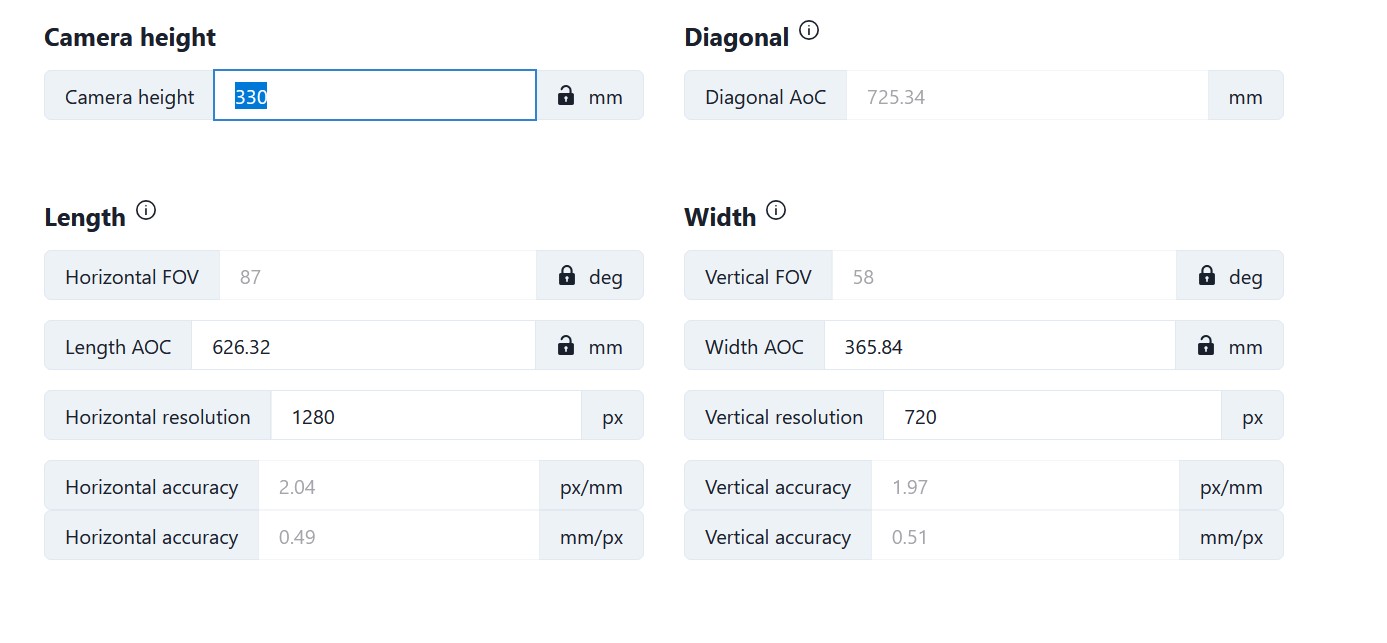
I am implementing depth cameras to precisely measure volume of objects placed on a table parallel to the camera (so the camera looks vertically from above). Given height, image resolution, and FOV I can calculate the spatial resolution i.e. how many mm of the table each pixel represents on the image. Having an array with height I can then sum them up to get the object volume (after cancelling background of course).
I have following questions:
why does the resolution for horizontal and vertical axes differs? Apparently the image sensor ratio 1280/720 is not equal to the FOV ratio tan(87/2) / tan (58/2). This results in different spatial resolution values for the axes. Why is it so and how to correctly calculate the factual resolution? (i.e. how many mm represents each pixel on the depth image when pointing directly on the object).
Here https://github.com/IntelRealSense/librealsense/issues/12523 you MartyG have mentioned "image field of view". Does it have smth to do with my question?
Thanks!
-
Hi Dmitrii Sokolov I do not have information to answer this question about resolution versus FOV ratio, unfortunately.
Rather than writing your own solution to calculate object volume though, I would recommend using the RealSense SDK's own pre-made Python volume estimation tool box_dimensioner_multicam if possible to do so.
-
I am afraid the suggested tool is not appropriate in my case since I measure volume of an extruded layer while the robot moving. I have achieved some success using the intrinsics fx and fy for calculating the volume of the object. Here is the link I got it from: https://dev.intelrealsense.com/docs/projection-in-intel-realsense-sdk-20#intrinsic-camera-parameters
Could you kindly elaborate on these fx and fy since there is only little information what they actually represent?
-
You are correct that there is not much information about fx and fy.
fx and fy represent the focal length of the image plane, as a multiple of pixel width (fx) and pixel height (fy). The values of fx and fy are usually close to each other.
https://intelrealsense.github.io/librealsense/doxygen/structrs2__intrinsics.html
Please sign in to leave a comment.
Comments
4 comments