Correlation between depth accuracy and accuracy of length measurements on surface/plane facing the camera
Hi,
Depth accuracy of each of the Intel RealSense depth cameras can be found in the technical datasheets.
However, I didn't find any documentation for accuracy/deviation when measuring distance between two points in the physical world, so here's an attempt on breaking it down.
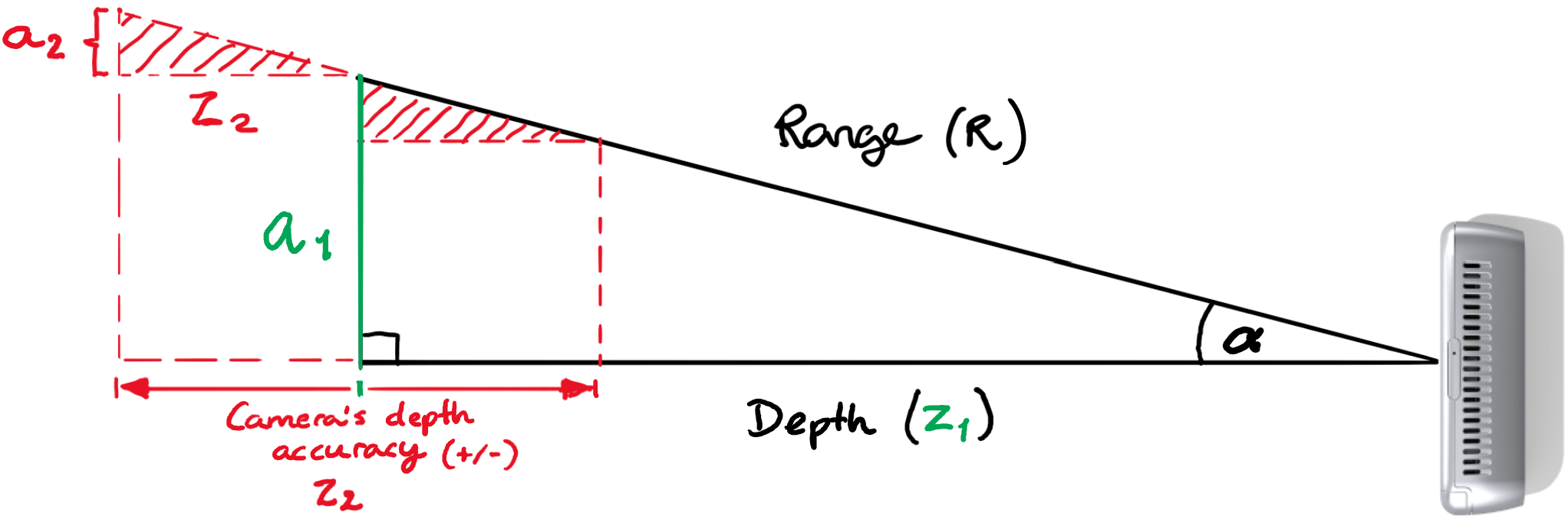
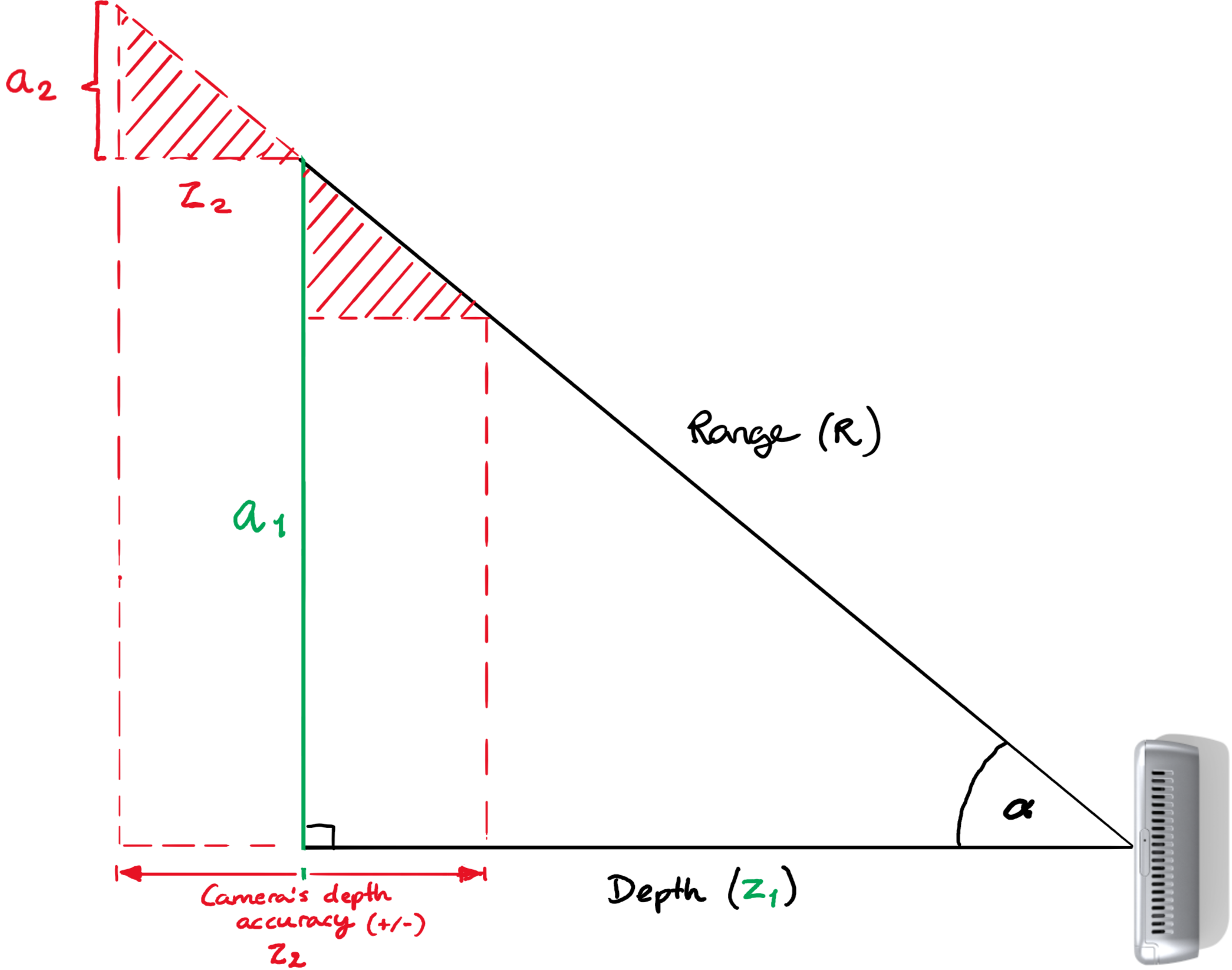
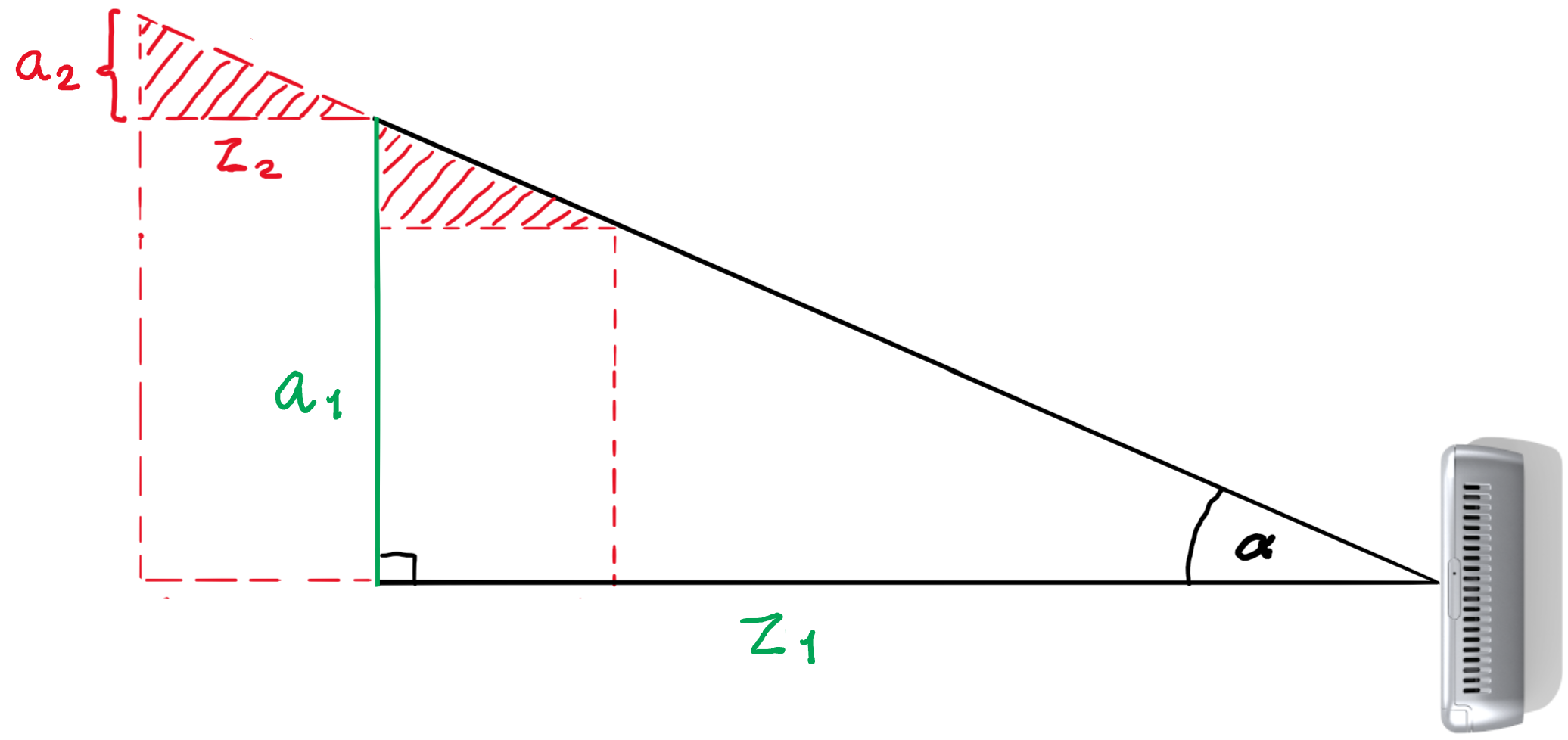
Case: How can we calculate the accuracy for measuring the length of a1?
A few notes regarding the examples below:
- Examples are seen top-down, with the camera facing a flat surface/plane (e.g. a wall or a box).
- The red triangles visualizes how the accuracy is affeced when the depth camera thinks the object surface is closer or farther away than it really is.
- "Z1" = the true distance from camera to surface/object
- "Z2" = Camera's Depth Accuracy (according to technical datasheets)
- "a1" = the true distance between two points measured on said surface/plane.
- "a2" = the +/- deviation (measurement accuracy)
It'd be great if I someone could confirm whether or not my thought process here is indeed correct.
Example 1 (smaller angle => smaller deviation (a2))
Example 2 (larger angle => larger deviation (a2))
... and finally, if I'm not mistaken; we end up with the following formula:
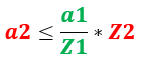
P.S. This basically means that moving the camera farther away from an object (though a bit unintuitively) might actually improve the accuracy of measurements performed on an object or plane by lowering the angle between Z and R.
It'd be great to know a bit more about how depth deviation is affected at other distances than at 1 and 9 meter mark as defined in the datasheet (e.g. is depth deviation increased proportionally with distance, or kept relatively the same at shorter distances like 1-4 meters?).
-
MartyG: Got any input on this one? 😊
-
Apologies for the delay in responding, as the question took some time to research. I located a past case that I handled where a RealSense user carried out the same kind of camera inclination test as yours and provided their results. Please read downward through the comments from the point in this past case that I have linked to.
https://github.com/IntelRealSense/librealsense/issues/2723#issuecomment-497637299
Moving the camera further away from an object (or the object further from the camera) can help to improve the horizontal aspect of the image in the sense that it can reduce the width of an area of bad depth at the left-hand side of the image. This is known as the Invalid Depth Band. The width of the band at the side of the image can widen as the camera gets closer to an object and shrink as it becomes further away.
Page 64 of the current edition of the data sheet document for the 400 Series cameras explains this phenomenon.
https://dev.intelrealsense.com/docs/intel-realsense-d400-series-product-family-datasheet
If you would like to discuss angles in terms of the L515 camera then please post a question about it at the RealSense GitHub by visiting the link below and clicking on the New Issue button, as that is where L515 related questions are handled.
-
Thank you for linking to some great articles Marty!
From your reply, it seems I wasn't really clear enough when describing the issue. My apologies, I'll try to elaborate a bit, see comments below 😊
Camera inclination
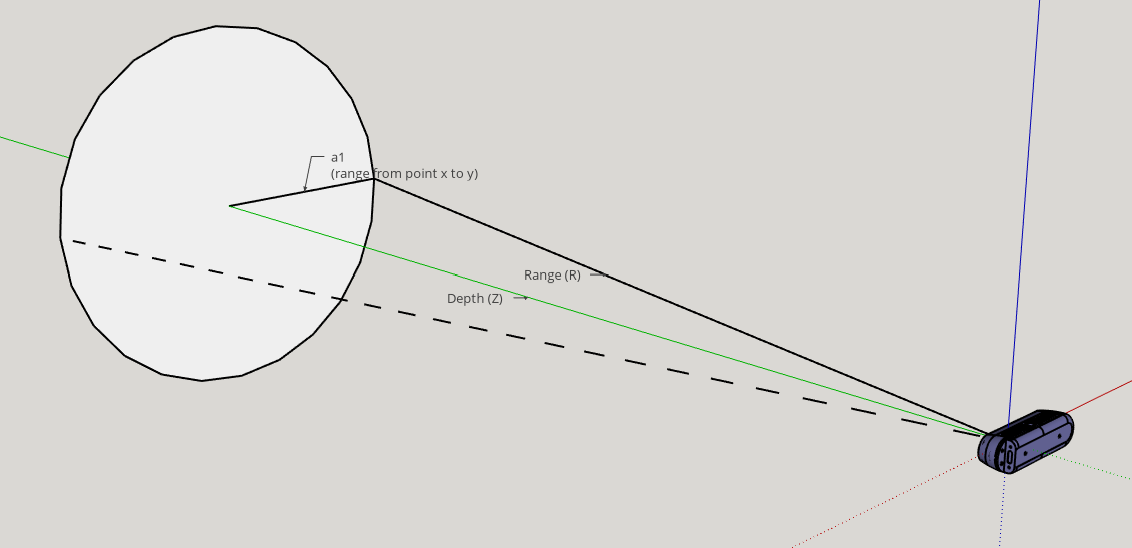
In my case study above the camera is positioned horizontally. Imagine the illustrations above as being seen from top->down. Distance of "a" is the distance measured from x to y on an object or plane perpenendicular to the Z axis (see illustration below for a corresponding side view).
Invalid depth band
Thank you for making me aware of this, though it's not directly linked to the issue I'm describing above. What I'm pointing out is that, regardless of the invalid depth band, there will be an inaccuracy of measurements made perpendicular to the Z axis (this inaccuracy will depend mainly on two factors: distance from camera (the camera's depth accuracy) and angle between axis Z and R).
Type of camera
Please note that I only mentioned the L515 just as an example. The same principle and formula should in theory apply for all depth cameras.I hope that makes sense. 😊
-
Are you asking please if accuracy of the depth measurements in an image may reduce as the coordinates move from the center of the image towards the sides of the image? If so then yes, this can happen.
Error can also generally increase linearly over distance (z), starting at zero at the camera lens and incrementing at a predictable rate as an observed object becomes further from the camera. This is known as RMS Error and starts to become particularly noticable beyond 3 meters from the camera.
The new RealSense D455 has improved accuracy over distance by a factor of 2x compared to the D435, meaning that accuracy is around the same at 6 meters as it is at 3 meters on the D435 models.
-
I tracked down the link to the case that I was thinking of about the inaccuracy in x and y when moving away from the center of the image.
-
Q: "Are you asking please if accuracy of the depth measurements in an image may reduce as the coordinates move from the center of the image towards the sides of the image?"
A: No, not really, though that is also a factor of interest, so thanks for linking that article. 😊
What I'm asking is:
Let's say you want to measure the length between two points of an object that is located straight in front of and with its surface facing the camera. In this case, depth accuracy is not really telling you much. What is of interest is the *accuracy of the length measurement* (in other words: accuracy of an measurement made in a surface/plane perpendicular to the camera's z-axis).My formula above was my attempt at solving the correlation between depth accuracy and perpendicular measurements. Don't know, but judging from your confusion I may be way off (or just terrible at explaining) 😂
P.S. Please have a new look at my original post. I've tried my best to improve my explanations and illustrations.
-
My recollection from somewhere is that the more extreme the angle that the camera is tilted at, the more "off" the measurements will be. For example, if going beyond a 30 degree maximum tilt angle.
The link below (more reading!), with advice provided by a RealSense team member, may be the best chance at answering your question.
https://github.com/IntelRealSense/librealsense/issues/2523#issuecomment-430246582
Please sign in to leave a comment.
Comments
7 comments