Has anybody tried to connect his/her own custom depth module to D4 board?
Anybody want to share their experience to help me with creating custom depth module. I am curious if anybody got hold of intel D400 depth module reference design, data sheet, etc. Would you just need compatible image sensors module with CSI-2 and 50 pin connector? Another thing is what image sensors would be compatible with D4 board. Intel doesn't say anything what is required in order to create custom depth module to connect it to D4 board, what is the point of D4 board if you cannot connect anything other than Intel's own board?
-
The primary function of the Vision Processor D4 is to do processing on captured camera data to reduce the need for a powerful computer CPU or graphics GPU in the computing device that the camera is attached to. This enables the 400 Series cameras to have extremely flexible hardware requirements and run on almost any computing device with an Intel or ARM CPU in it.
It was originally planned that users would be able to connect their own custom modules to the second (lower) 50 pin connector on the D4 board instead of the Tracking Module or an RGB Sensor. The January 2018 edition of the data sheet document (in the link below) had full details of the lower connector, in the 'Tracking Module' section of the document.
https://www.rutronik.com/fileadmin/Micropages/Intel/Intel_RealSense_D400_Series_Datasheet.pdf
Intel removed these details from the March 2018 edition of the data sheet onwards though because they retired the 'T150 Tracking Module' IMU component (a predecessor of T265) that had been planned for use with the lower connector, and also decided not to support connection of custom modules and RGB sensors via MIPI. Support for this is therefore not in the firmware driver. So the physical hardware for connecting a custom module is present but not the necessary firmware driver software support for it.
Before Intel decided not to support custom configurations, a member of the support team said that adding a custom module to the second connector would be a matter of creating a custom cable to join the module to the D4, and then just doing a calibration once the module was attached. As things stand, it might be possible in theory to write your own firmware driver to take advantage of a custom module. In practice though, as Intel do not provide open-source code for the firmware, it would be extremely hard to know where to start in doing so and is probably not covered by the device's warranty.
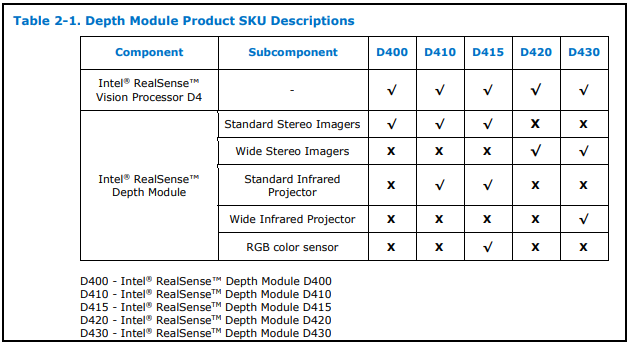
In regard to creating a custom depth module, the data sheet documents have extremely detailed tech specs. And Intel are willing to work with customers making large-volume orders to produce a customized product with a different sensor, baseline length, etc. Examples of such customizations are shown in the image below. This suggests that the standard firmware could handle such changes. I do not know of anyone who has actually made their own depth module successfully though, and the imagers mounted to the depth module board on the retail models cannot be removed without breaking them.

-
Thanks for very in depth answer. That was quick. Now I know that is the second 50 pin connector for. Thanks at least I know somebody tried it before.
I am actually planning to use the top 50-pin connector that one which you would normally connect external depth module (like this one https://www.mouser.co.uk/ProductDetail/Intel/82635DSAWGPRQ?qs=sGAEpiMZZMsK5LjOSsCw1ctzEaTW%2FxkVbhDx3DNs6kNpJUzRgMLi1Q==)
From my understanding these are just standard MIPI CSI-2 camera modules (OV9821 and OV2740), so any modules with similar spec (MP/s, etc.) should work.
The spec sheet is detailed but only has the ref. designs which are for D4 board not for depth modules board which are more interesting. Just wondering if anybody got hold of these reference designs, I would like to make sure there is nothing special inside before I try.
-
That would make sense, given the number of different RealSense depth module configurations that are produced but only one D4 is produced (unless you count the D4m mobile variant). Some key features such as hardware sync also use a combination of open source SDK and closed-source firmware routines, with the feature not able to function without the firmware part of the support.
Looking at a diagram of the depth module in the data sheet, it seems like additional components such as the EEPROM (which stores calibration data) would need to be incorporated into a custom board (though not necessarily the IR projector, since not all module boards in the range have one). The differences between the modules are summarized in the table below.
I do not have any further suggestions I can make about designing a custom depth board, unfortunately. You are certainly not the first person who has asked about the feasibility of doing so.
Please sign in to leave a comment.
Comments
5 comments