Need help with projection and deprojection
I have a D435 looking the top of a table (0.80m between camera and table). I project point (0,0,0.80) to pixel and display it. I draw the point on the table, so the camera (0,0,0.80) is aligned with it.
Then I draw a second point on the table 10cm away on x and on y of the first one. And I try to project point (0.1, 0.1, 0.81) - the second point I drew on the table with 0.81 => distance between second point and camera - to pixel and display it again. My second point and my second pixel is not aligned at all.
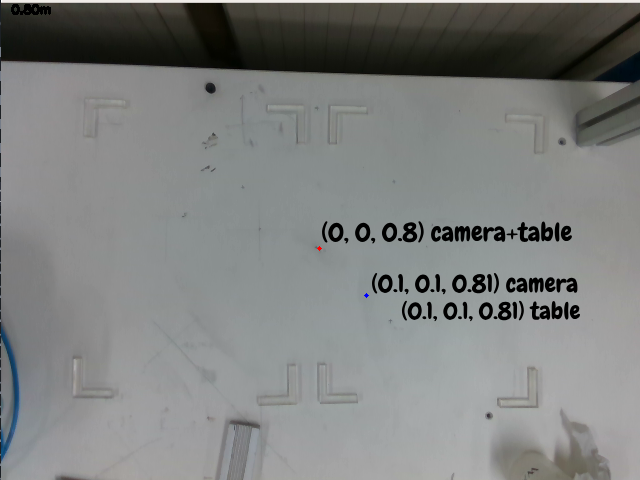
You can see on the image the shift.
I use pyrealsense2 with a config 640, 480 for color and depth. I get the intrinsics with the video stream profile. And I just use get_distance() and rs.rs2_project_point_to_pixel() functions.
I don't know if I'm doing it good. At the final I just need good coordonate from the camera in order to give them to a robot with a transformation matrix.
-
Your project reminds me of RealSense users who have attempted to get a 'pose' with the camera that would be usable by a robot. The link below contains links to approaches taken by users trying to use the D435 with a robot arm for the purposes of picking items from a bin..
Please sign in to leave a comment.
Comments
3 comments