D430 v/s D435if depth detection capability dependent on RGB sensor
Hey, I have a question regarding the depth detection using the D430 module which doesn't comes with RGB camera. I have already tested D435if depth camera to detect depth up to 1.6 m and results are satisfactory but it includes RGB camera as well. D430 includes 2 imager (Left and right) and IR projector.
- Can you please help me understand what are the limitations of sensing depth with and without RGB camera?
- Can i replace D435if by D430 and achieve the same outcome?
- My goal is to the take the information out of the processor locally utilizing edge sensing or local sensing by detecting difference in depth of the object and around the object! So, it doesn't matter visually whether the image is colorful or black and white as the information of the pixels are the only thing which is used
- Also, I want to detect 2 D tags (black and white) in the FOV which I believe D430 is capable of?
Looking forward to hearing back from you soon,
Thank you
-
Hi Utanwar An RGB sensor is not required for detecting depth, as the camera generates a depth frame from a pair of left and right infrared images. These are raw infrared images produced by the camera and not the infrared stream, and so the depth stream can be used without the infrared stream being enabled.
In regard to limitations, depth error starts at around zero at the camera lenses and increases linearly over distance. This is called RMS Error. On the 'D43...' type models, drift in accuracy will start to become noticeable at around 3 meters distance from the camera and beyond.
The filter on the D435if camera model helps it to better handle light reflections and 'repetitive patterns', which are regular horizontal and vertical patterns of similar looking objects in the real-world such as a row of fence posts or floor / ceiling tiles. If you are using the camera indoors under artificial lighting and detecting image tags, the D430 will likely be sufficient for your requirements.
If the tags are outdoors then the D435if will be helpful for filtering sunlight which could otherwise be disruptive if the camera was faced directly towards the sun.
For a RealSense 400 Series camera such as D430 or D435if, the type of marker tag typically used would be Aruco tags rather than AprilTags.
https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html
The YouTube link below has an example of using a RealSense camera with an Aruco tag.
-
Aruco tags are black and white.
https://docs.opencv.org/4.x/d5/dae/tutorial_aruco_detection.html
-
Thank you so much for replying back MartyG!
This answers my questions on using D430 v/s D435if and its ability to detect Aruco tags.
I have a follow-up question on, given this module/camera has IR projector with wavelength of 850 nm, will it be affected and how badly it will get affected if the electronics present in the vicinty of this module/camera also uses similar wavelength and LiDAR system for automatic maneuvering?
If that's the case, is there a way to mitigate this issue?
Looking forward to hearing from you soon
Thank you
Udit -
RealSense 400 Series cameras are not interfered with by IR from non-RealSense IR devices but can interfere in return with those devices. For example, a nearby wireless mouse transmitter or an IR card reader could be negatively affected.
There was an automated robot boat project called Roboat that used both 400 Series and lidar cameras. The lidar was placed on the roof of the boat for navigation whilst the 400 Series cameras were placed on a curtain on the base of the boat so that they could interact with tags on docks to aid automatic docking. Because the two camera types were placed a distance apart, they did not experience conflict.
Further information about the Roboat project can be found at the link below.
-
Thank you again MartyG for quick response!
Just to clarify, you mentioned, '400 Series cameras are not interfered with by IR from non-RealSense IR devices' and 'because the two camera types were placed a distance apart, they did not experience conflict'
The first event that it will not interfere with non-RealSense device holds true always irrespective distance or distance is a factor here? -
The intensity of the RealSense camera's IR light is at its most intense close to the front of the camera and the intensity reduces over distance. So distance between the RealSense and lidar cameras will be a factor.
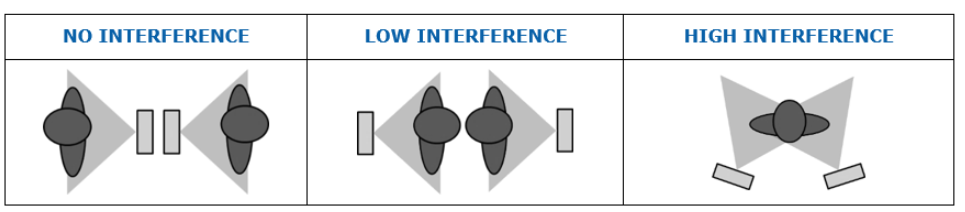
Interference should also be reduced if the paths of the individual IR projections do not overlap (for example, when the cameras are facing in different directions or positioned sufficiently far apart). The image below demonstrates this with multiple RealSense L515 lidar depth cameras which, unlike the 400 Series stereo depth cameras, do interfere with each other when their views overlap.
https://dev.intelrealsense.com/docs/lidar-camera-l515-multi-camera-setup
Intel have a detailed RealSense white-paper guide about projectors at the link below.
Please sign in to leave a comment.
Comments
6 comments