Request information regarding D405/d435
-
Hi Streetman Support is provided via this online forum rather than by phone / video call. It is likely that the correct RealSense camera for your project can be identified without having to disclose any confidential information though simply by knowing the general application of 'final docking'.
If the final docking takes place at very close range to the camera (7 cm to 50 cm from the camera) then the D405 can provide high quality, high accuracy depth imagery. If the docking mechanism has a plain smooth surface then the D405 model would not be able to depth-sense it well. It would also not be suitable for use in a dark / dim environment without an external lamp to provide the scene with illumination.
If you require close range operation in a dark / dim environment and the docking mechanism will not be nearer to the camera than around 10 cm then the D435 or D435f would be worth considering as these models are equipped with an infrared projector component that can cast a semi-random infrared dot pattern onto plain surfaces to help the camera to analyse them for depth information.
If the camera will be operating outdoors or in an environmentally challenging location then the D457 model has an IP65 rated casing that protects the camera from water and dust. The docking mechanism will need to not be closer to the camera than around 50 cm though.
Please feel free to communicate in this discussion in Italian if you are comfortable with that as I can translate.
If a confidential discussion is required then support through a private web ticket can be arranged by this Help Center.
-
The requirements are :
-extreme environment (total darkly/ presence of direct sunlight)
In order to overcome this problem I think to use different Leds on the surface to dock/ use a band pass filter to remove the noise of the Sun.The docking distance should be less than 7 cm, if possible. This because I have a very restricted space where allocate the docking mechanism.
The surface to dock is a baseplate of alluminium. This is probably smooth.
In order to avoid this problem I can insert the led or out of plane from the baseplate, or maybe inside the baseplate for example 1 cm inside the plane of the plate.There is a way to trying to overcome all this problems? For example by using the 405 I can put the leds on the the baseplate to dock in order to see it. If there is the presence of sun I can also use a band pass filter to remove the undesired wavelengths.
But the problem is reduce the 7 cm at least to 3 or 4 cm and also seeing a smooth surface ( in this case create a cross pattern of 5 led with the cental one inside the plane of the of 1 or 2 cm . What do you think about this? -
The D435f model is fitted with a CLAREX NIR-75N filter on its sensors that absorbs visible light whilst permitting near-infrared light to pass through it. This IR pass filter enhances depth noise quality and performance range in many robotic environments.
However, the D435f's minimum depth distance cannot be reduced below 7 cm due to the characteristics of its hardware design. So using a D405 and providing external illumination for it may be the best option for you. A D405's minimum range can be reduced to 4 cm by using a RealSense SDK software option called Disparity Shift. The link below has an example of a RealSense user who accomplished this with their D405.
https://github.com/IntelRealSense/librealsense/issues/10963#issuecomment-1274941411
I have previously seen a case where a RealSense camera was able to perceive a set of LED bulbs.
-
So in this case do you think that is possible to perceive a set of led Bulbs. Can you send me please the link in order to see it, please?
Another question is : the camera gives directly the distance of the body and also the orientation correct? It is possibile to extract directly this value from the application in live streaming? Or I have to generate an algorithm in order to obtain for example the value of azimuth and elevation of the body?
The last question is : in case I will reduce the minimum distance to 4 cm, how much is the accuracy? The maximum detection range is always 50 cm or it is less? In this case how much is the value of the accuracy?
Thank you so much for your response.
I really appreciate it -
I located the case that was using a set of diodes.
https://github.com/IntelRealSense/librealsense/issues/10429#issuecomment-1107853739
The D405 model is not equipped with an IMU component for tracking orientation like the D435i, D435if and D455 models have. A RealSense camera without an IMU can obtain orientation using a plane fit algorithm though.
https://support.intelrealsense.com/hc/en-us/community/posts/360050894154/comments/360013322694
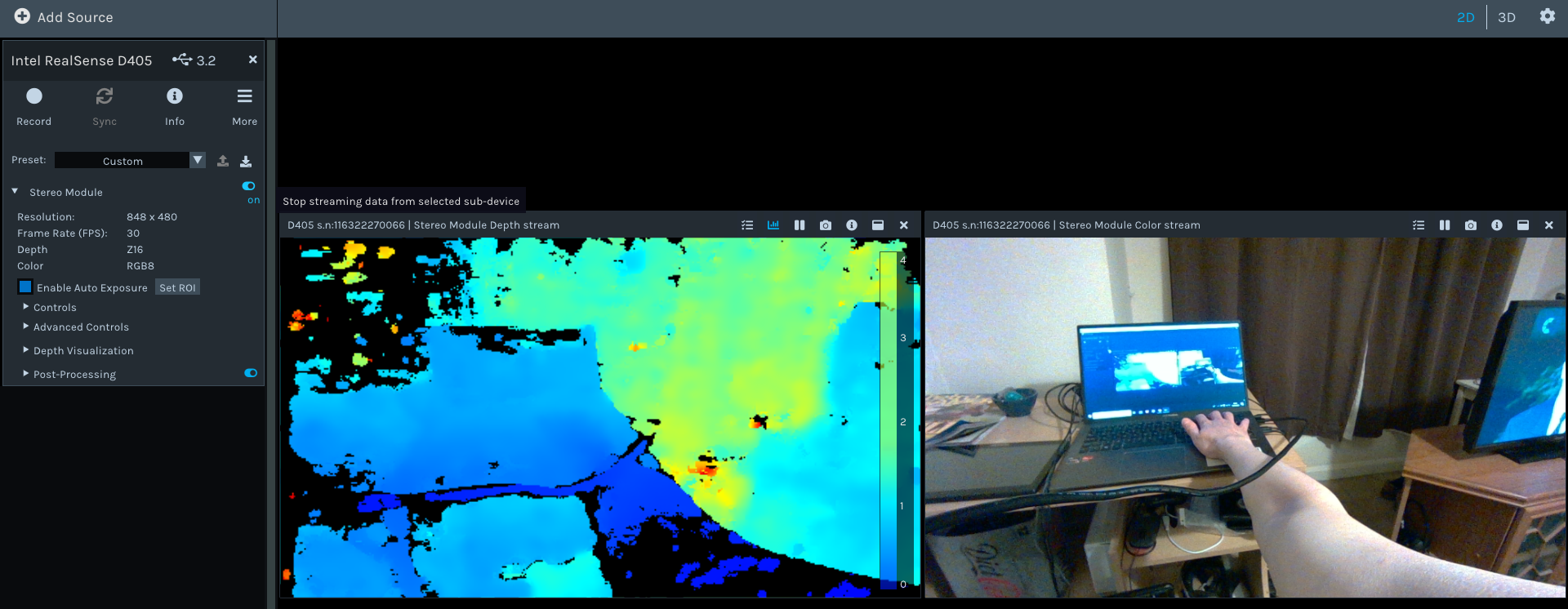
The ideal depth sensing range of the D405 is 7 cm to 50 cm. It can depth-sense a bit further than that though. The image below shows the camera 2 meters from some curtains. Assume around 1.5 m as the maximum depth distance.
Intel's comparison chart for the RealSense range lists depth accuracy for D405 as <2% error at 50 cm.
https://www.intelrealsense.com/compare-depth-cameras/
You can test the error at a particular distance using the RealSense SDK's Depth Quality Tool program.
Please sign in to leave a comment.
Comments
8 comments