Stereo Camera functionality
I am new to intel realsense and I wanted to know if the following was possible:
I would like to generate a surface model using a (d400 series) camera whose coordinates relative to some fixed position and orientation in space are known, regardless of where the camera moves after the acquisition of the surface starts. I assume that if this is possible, the camera will tell you the (x, y, z) coordinates of the surface relative to where the acquisition began. I would then use a tracking system (affixed to the camera) to relate the output surface coordinates to other tracked tools in the workspace. Any guidance, tutorials, or references would be sincerely appreciated.
Thanks!
-
Hi Dfr At the link below, a RealSense user created a SLAM navigation guide for ROS for the RealSense D435i camera model that included mapping and localization with RTABMAP, plotting trajectory and obtaining the relative position of the camera from a recorded pointcloud map. Does this guide meet some of your needs, please?
https://shinkansan.github.io/2019-UGRP-DPoom/SLAM
-
Hi Marty,
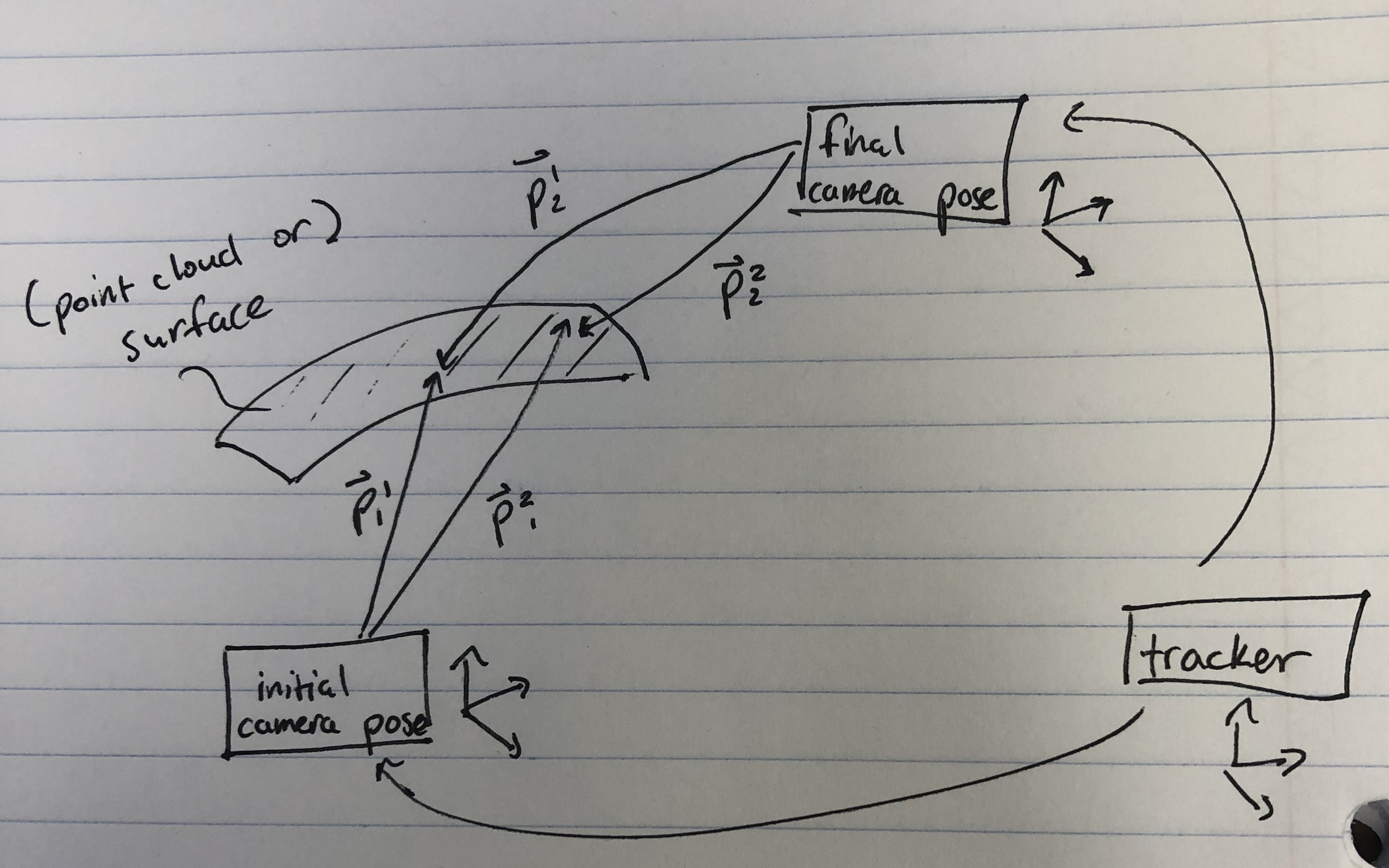
Thank you very much for your timely response. While this is an incredibly sophisticated system, I do not believe we would need the localization component of what SLAM offers. I will rephrase the question to give you a better sense of what the needs of the camera would be. We hope to create a surface rendering (or point cloud) of a given object by moving the camera about the surface of the object, which we assume the camera is capable of doing without any additional extensions. After the acquisition, we want to know what coordinate frame the surface rendering will be in. I have provided a diagram for clarity (hopefully) and pasted it below. Please let me know if anything needs clarification--I would be happy to clarify. If you would be able to point me in the direction of the demos/guides that explain this sort of detail, that would be great. Thank you again for your help.
-
A starting point for what you have in mind could be the SDK's C++ and OpenCV example program rs-kinfu (KinectFusion). It progressively builds up a point cloud as the user moves around a single camera, fusing frames as the camera is in motion. When you are satisfied with the level of detail on the point cloud, you can export the cloud to a .ply format point cloud data file.
https://github.com/IntelRealSense/librealsense/tree/master/wrappers/opencv/kinfu
Please sign in to leave a comment.
Comments
4 comments