D415 Accuracy at close range
Hello everyone,
I am working on a project using D415 cameras for close range observations (around 20cm).
We set the disparity shift value to 153, which seems to give us a depth estimation between 18 and 25 cm.
I have some questions about our use of the camera :
- Is it a good practice to use this camera with this disparity shift value ?
- At this distance do we still have a 2% accuracy ?
- Regarding our need to be able to work in that range with the greatest precision, are there any parameters we should be fine tuning ?
- Are there others Intel cameras we should look into ?
- Concerning the depth accuracy, we would like to precisely (meaning ~ 0.01mm) measure it, to check what kind of accuracy we really get at our working distance. We understand that we can take several starting points (i.e. applying offsets to depth measurements) as references such as : the back of the module, the front glass cover... which are accessible points for our measurements. However what happens if we re-calibrate the cameras ? The intrinsic parameters will change (like the focal distance, the optical center..), but we have no means to recalibrate these offsets correct ?
- Is it ok to try measuring the depth accuracy using one of these starting points (back of the module, or camera front glass) even after a new calibration ?
Thanks a lot for your help !
-
1. As the Disparity Shift value is increased, the minimum depth distance of the camera decreases but the maximum observable depth distance of the camera also reduces.
Whilst a Disparity Shift value of '50' gives a good balance between reduced minimum distance and retaining a good amount of the background, '150' will enable the camera to get closer to an object at the expense of a large amount of the background detail being excluded from the depth image. This is not a wrong choice of value if the background detail is not important to your particular application though, as your 20 cm distance from the observed target indicates.
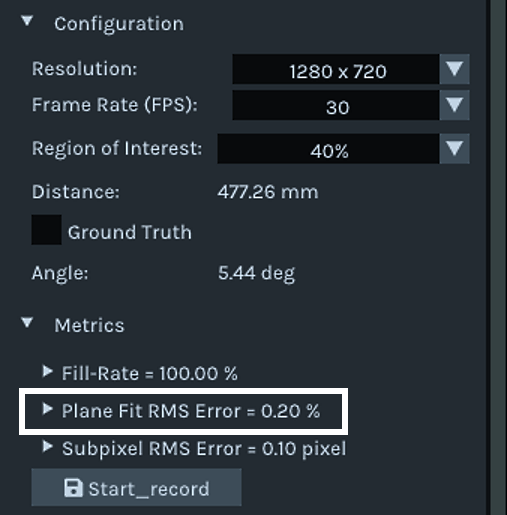
2. You can check the current extent of general depth measurement error of your camera in real-time in the Depth Quality Tool program. Once you have followed the on-screen prompts to point the camera at a flat wall, a Plane-Fit RMS Error setting automatically appears near the bottom of the options side-panel that provides an % estimate for the error factor of the camera. If the value is greater than 0.2% then the camera may need to be re-calibrated, especially if the Fill-Rate value displayed directly above the RMS value is degraded.
In the test image below we can see that RMS error is exactly 0.2% and the Fill-Rate (the amount of detail on the dpeth image) is 100% and so that particular camera likely does not need a re-calibration.
In regard to a specific estimate for accuracy at 20 cm range, 2% should be an achievable value on your D415, especially as the D415 model has less noise / better accuracy over distance than D435 / D435i.
3. The optimal depth resolution to use on D415 for depth accuracy is 1280x720.
4. The new D405 model, which specializes in accurate close-range sensing with an ideal range of 7 cm to 50 cm, will likely provide better performance at 20 cm than a D415 using Disparity Shift. As the D405 does not have a built-in projector to cast a dot pattern on the scene to aid depth analysis of surfaces though, the D415 may be the better choice if you are observing a smooth object with a low-texture surface or are sensing in dim / dark lighting conditions.
It has been suggested that an external visible pattern projector could be used in conjunction with a D405 to aid depth analysis by casting onto a surface a pattern that the camera is able to see. The D405 has IR Cut filters on its sensors that make infrared frequencies (including projections from infrared pattern projectors) invisible to the camera.
5. The minus-value added to depth measurements to find the ground truth depth value at the lenses is a fixed value. The depth unit scale value does not change unless altered deliberately. Changing the focal length of the calibration will not change the focus of the camera lenses, as described by RealSense team members at the link below.
https://github.com/IntelRealSense/librealsense/issues/7814#issuecomment-732772348
6. It is fine to measure depth from whatever frame of reference you prefer - from the front glass, or from the lenses or the back of the module. The majority of RealSense users who use a camera model with front glass are likely to just use the default measurement from the front glass though.
Please sign in to leave a comment.
Comments
1 comment