green Chilli and and how to find them
I am working on a project to pick up green chili from tree using a robot arm. can anybody confirm whether the camera can measure the distance of a single green chili in a standing position within mili-metre accuracy from a distance of 30 cm ? I need to confirm before i buy this camera. My budget is so tight i can not waste money if it does not work.
Thanks.
-
Hi Samiulextreem The ideal depth sensing range of the D405 model is 7 cm to 50 cm. So it is capable of being used for depth sensing at 30 cm from the chilli.
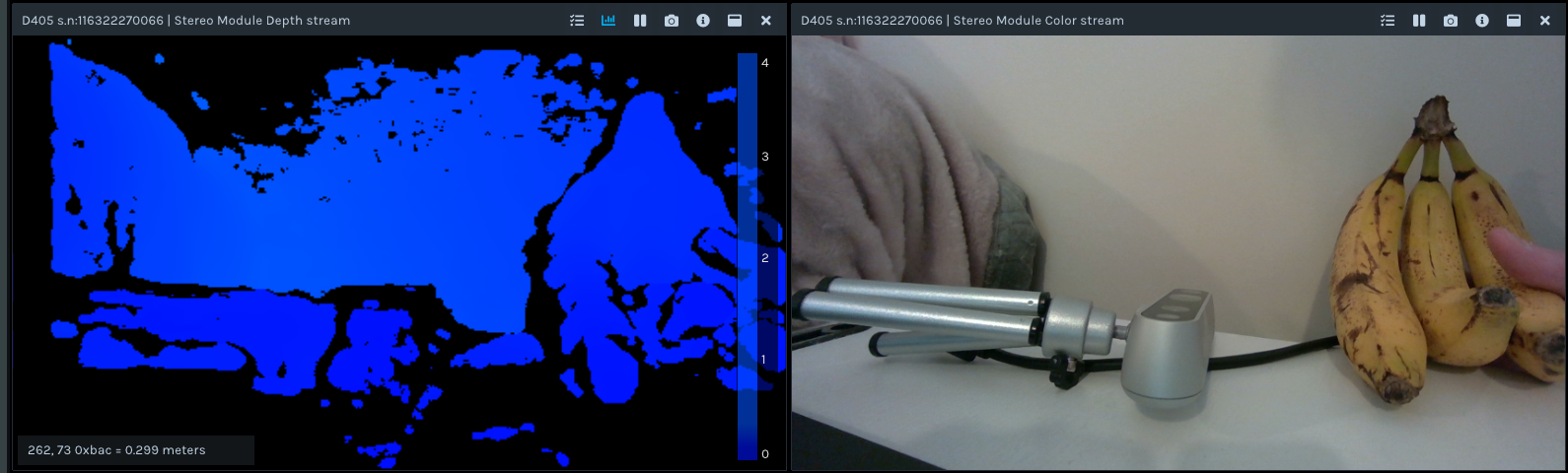
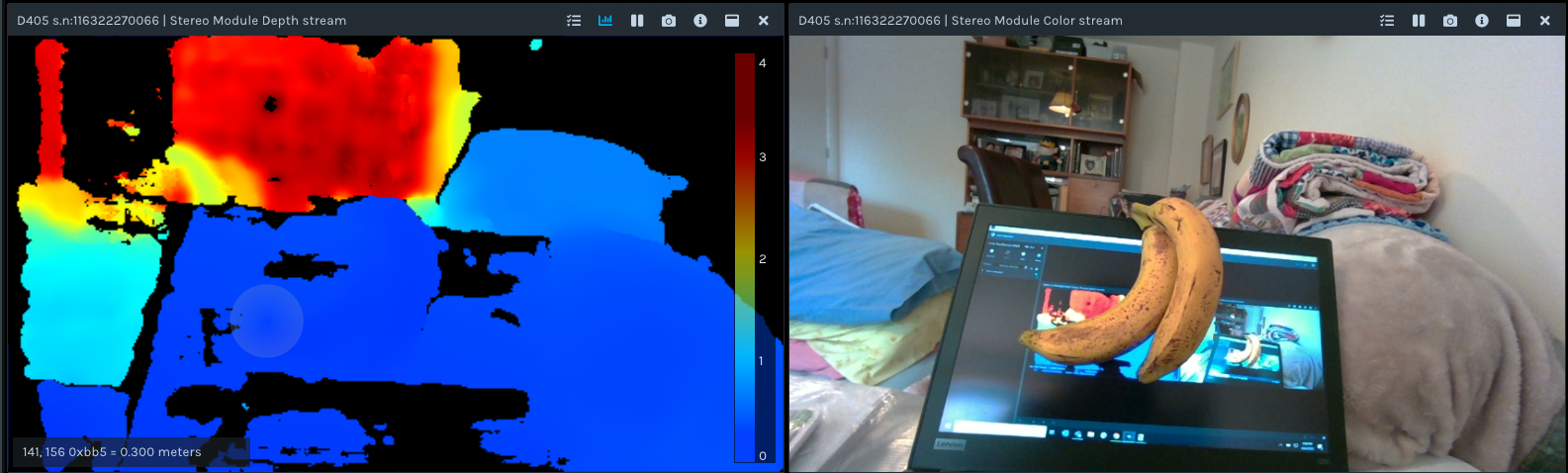
Although I did not have green chillis to test with, I tested a D405 with yellow bananas in a hanging pose to try to simulate chillis on a tree. At approximately 30 cm from the bananas I was able to achieve 0.299 meters (29.9 cm) when placing the bananas against a plain wall backdrop and using the Medium Density camera configuration preset in the RealSense SDK software (which gives a good balance between accuracy and a good amount of detail on the depth image), and 0.3 m (30 cm) when hanging the bananas from a laptop screen.
I cannot guarantee that you will have the same results in a different environment (outdoors) with an actual chilli tree, but I can vouch for the short-range sensing accuracy of the D405.
As the D405 model does not have a built-in infrared projector, I would recommend choosing it if the camera will be used in good outdoor lighting and not in dim / dark conditions. If you anticipate having to scan in low light or darkness then the D435 or D435i would be a better choice. These cameras have a minimum depth sensing distance of 0.1 m / 10 cm, so would also be able to be used at 30 cm range (though may not have the same fine degree of close-range depth measurement accuracy as the D405).
-
thanks for you valuable response @MartyG. Indeed i plan to apply my work in outdoor environment.
One thing i am worried about the chills problem is that chili is small and tiny(Bangladeshi non hybrid). I am worried if it can be picked up by the camera or not.
Lets forget about chili and think about a pen. I will really appreciate if you give me some insight if the camera could measure distance of a normal ball pen in a standing pose at a distance of 30- 40 cm within 5 mm accuracy?
-
Tests determined that a pen was invisible at 30 cm unless depth resolution was increased to 1280x720, at which point the outline of the pen became visible. The depth read at 30 cm (300 mm) was around 0.336 m (336 mm). This reading was likely because the faint outline of the pen made it difficult for the camera to distinguish the pen from the background behind it. At 40 cm at 1280x720 the pen disappeared.
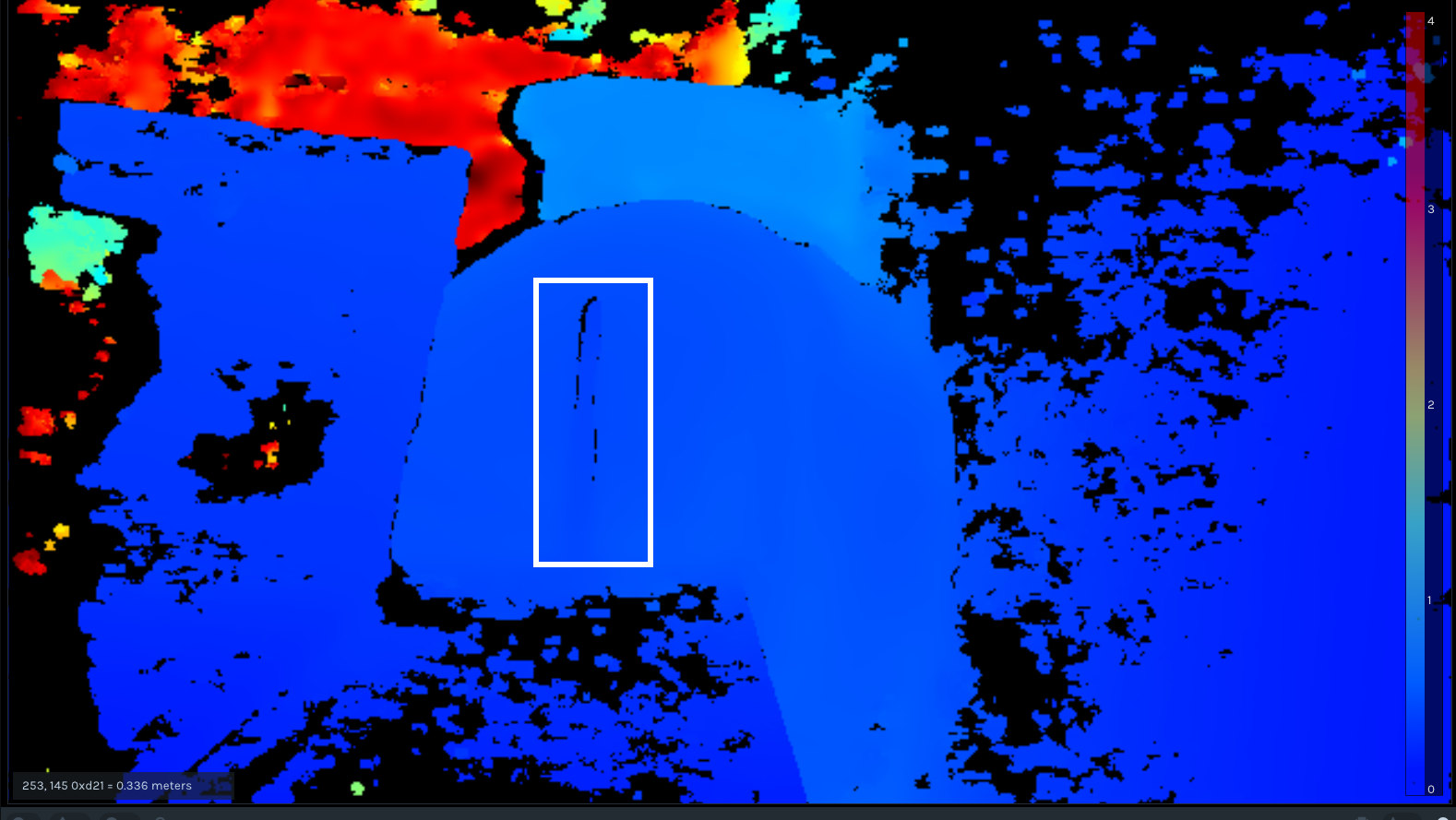
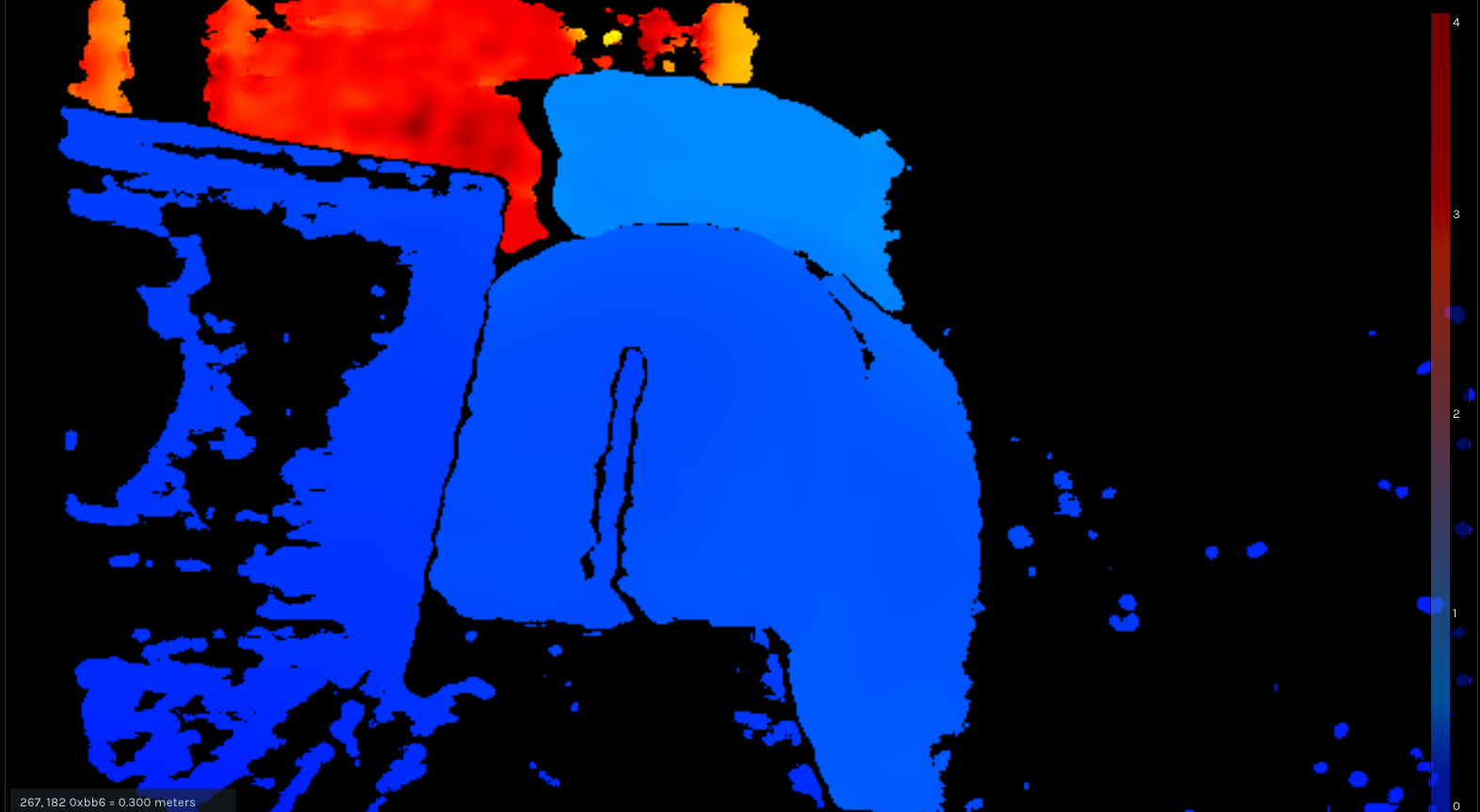
However, the pen was enhanced considerably and able to be detected at the correct 0.3 m / 300 mm if the RealSense SDK's Second Peak Threshold setting was reduced to zero from its default value of '325'. Beyond 30 cm distance though, the pen started to become invisible, giving inaccurate readings at 35 cm and disappearing at 40 cm.
-
In a past case I tested a D435i with a similar thin and long object, a toothpick.
-
That git thread is exactly what i am looking for. It looks like with proper tweaking, if D435 can generate cloud points of a tooth peak than it should be able to generate cloud for a chili which is fatter than a toothpick. If point cloud is generated then getitng a depth based on the cloud should not be a problem within a reasonable accuracy right?
-
A 3D point cloud where RGB color is mapped onto depth coordinates like the point cloud in the second image of that toothpick case may produce the clearest and most reliable results. The D435 would also have the advantage of having a built-in projector component to cast a pattern of infrared dots onto the surface of the chilli to aid depth analysis of it.
Please sign in to leave a comment.
Comments
7 comments