How to get the speed using the imu data from Intel Realsense Depth 435i
Good-day,
I want to use Intel Realsense Depth 435i to botain the speed of the camera and align it with the frames of the video, how can I actually do this, and is it possible to be developed on Windows?
Thanks
-
Hello,
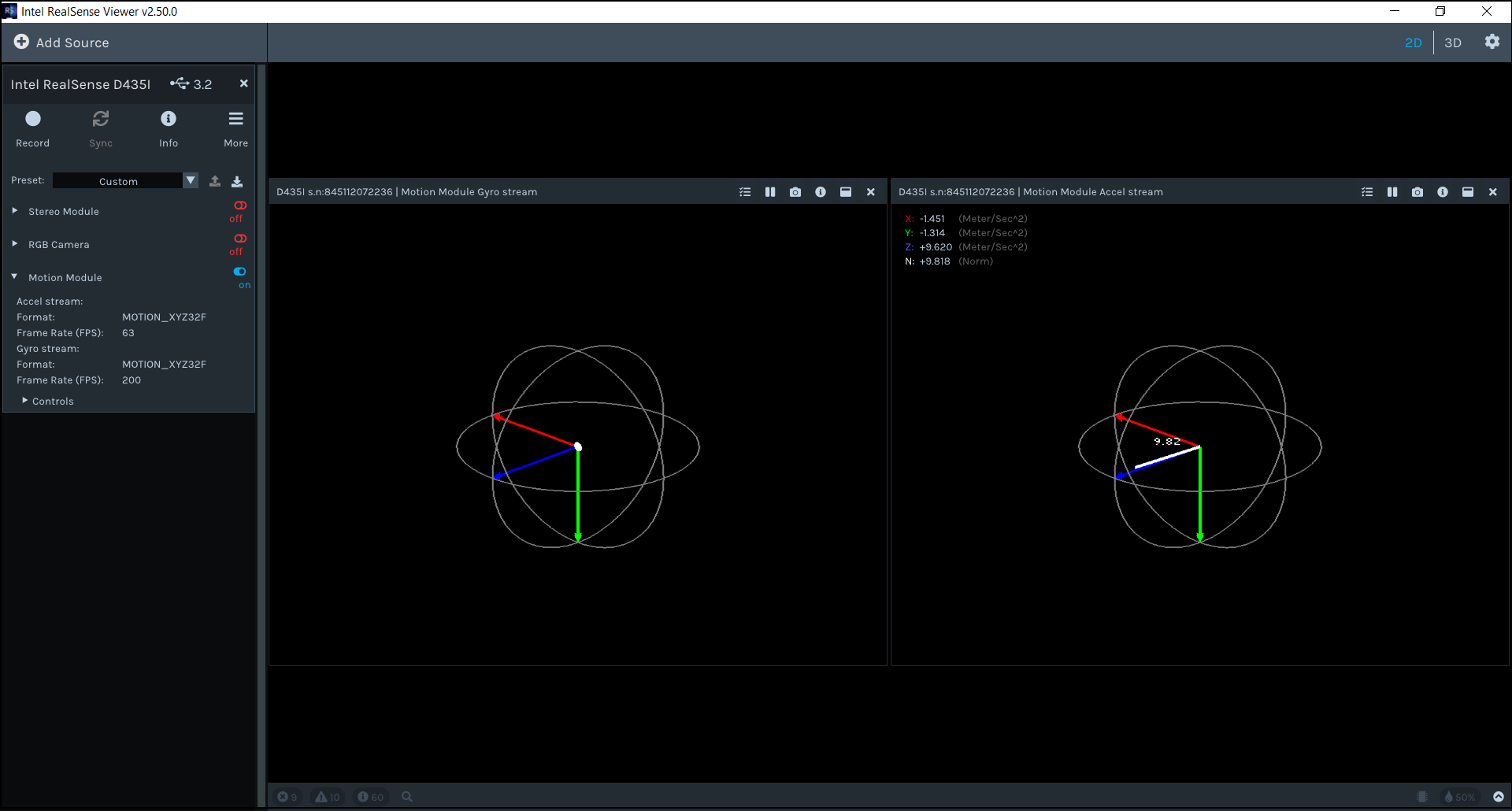
You can obtain the IMU accel values representing the motion speed of the camera using the existing pre-made RealSense Viewer tool, as shown in the image below. The RealSense Viewer tool is available on both Windows and Linux.
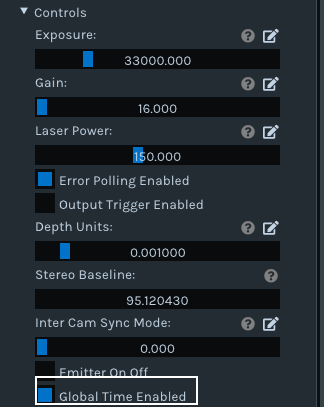
If an option called Global Time is enabled then the RealSense SDK will attempt to automatically find the closest match for the frame timestamps of different sensors. Global Time is enabled by default in the RealSense Viewer under the Stereo Module > Controls section of the Viewer's options side-panel.
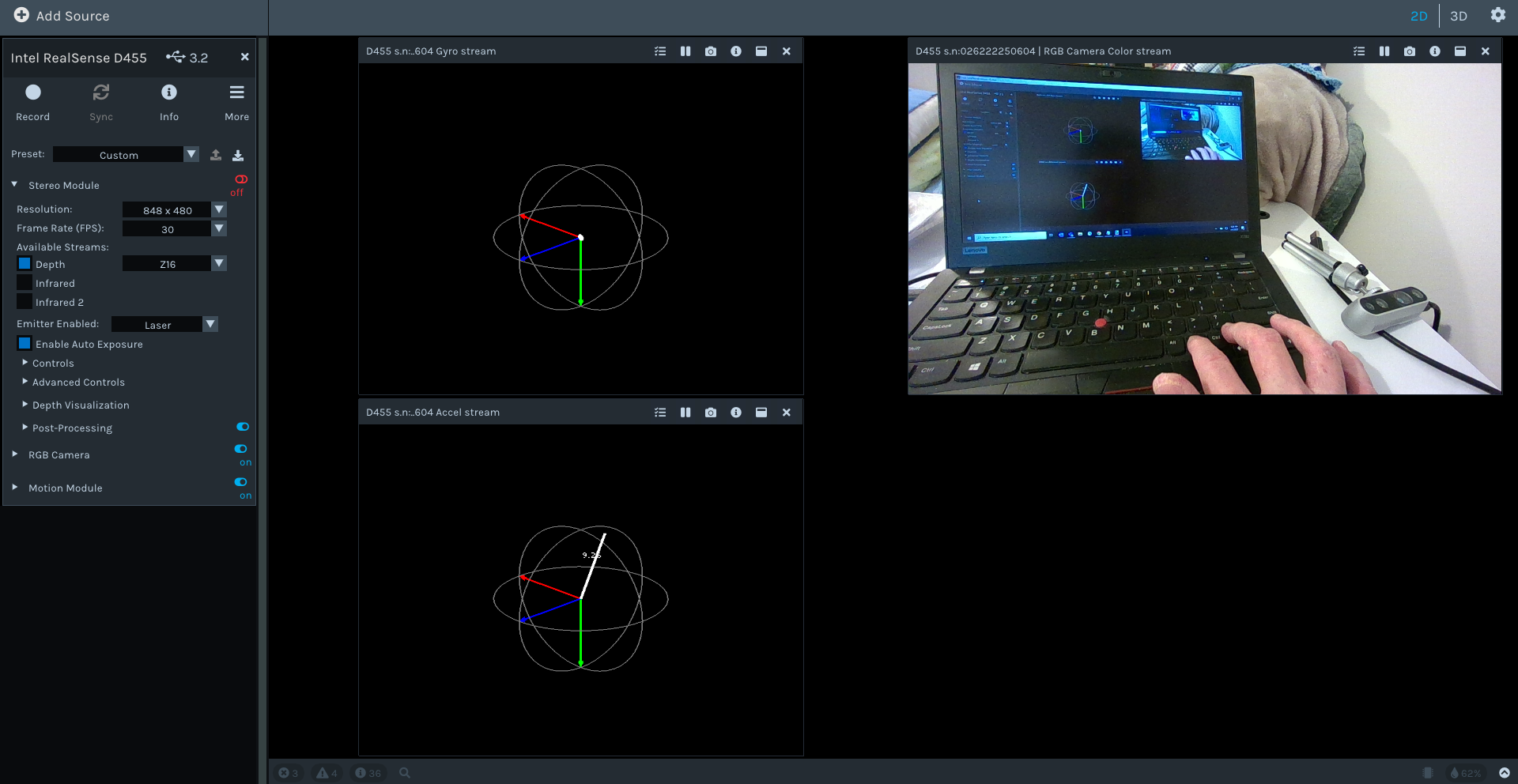
The RealSense Viewer also enables you to stream different data types alongside each other simultaneously, such as IMU and RGB video in the image below.
If the above information does not match your needs, please provide further information about what you are aiming to achieve with your project and I will be pleased to advise you.
-
The D435i would not be a suitable choice of camera model for tracking the linear velocity of the device. The RealSense T265 Tracking Camera would be the appropriate model choice for obtaining real-time linear velocity of the camera, as demonstrated in the link below.
https://github.com/IntelRealSense/librealsense/issues/4876
The rate of position change of the T265 could also be represented as a moving line instead of a numeric value, as demonstrated by Intel's T265 example program rs-trajectory
https://github.com/IntelRealSense/librealsense/tree/master/examples/trajectory
The T265 does not have built-in depth sensing but can be paired with a 400 Series depth camera on the same mounting point (e.g a mobile robot).
https://dev.intelrealsense.com/docs/depth-and-tracking-cameras-alignment
Please note that the T265 model is End of Life (retired) and so does not receive product updates and support.
If your preference is to use only the D435i model, conceivably you could estimate velocity by using the D435i SLAM navigation guide for ROS at the link below that provides values for the relative position of the camera in relation to a loaded-in map, and then develop a calculation for comparing the rate of change of current and previous relative position values.
Please sign in to leave a comment.
Comments
4 comments