Extrinsic transform between the Depth stream and the Infrared stream
Hi,
I use command: rs-enumerate-devices.exe -c to list all intrinsic and extrinsic parameters for D435i camera. I found the extrinsic parameters from Depth to Infrared1 are identical to the parameters from Depth to Infrared2. As I know the origin of the Depth stream is the origin of the Infrared1 camera, so it makes sense the transform between Depth and Infrared1 is identity. However, why the transform between Depth and Infrared2 is identity too?
I list part of the result of the command as follows:
Extrinsic from "Depth" To "Infrared 1" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Extrinsic from "Depth" To "Infrared 2" :
Rotation Matrix:
1 0 0
0 1 0
0 0 1
Translation Vector: 0 0 0
Thanks a lot!
Yixun
-
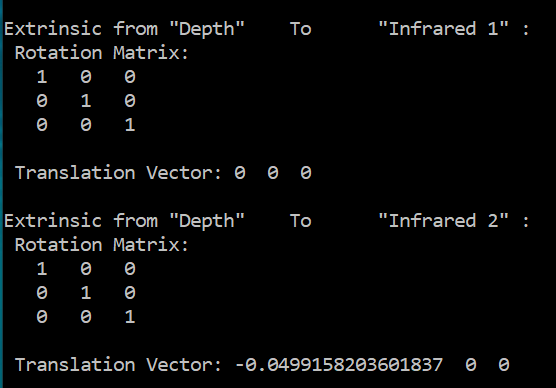
Hi Yixun Liu Shown below is the rs-enumerate-devices -c listing of the 'Depth to Infrared 1' and 'Depth to Infrared 2' extrinsics from my own D435i, showing a different value on the 'x' translation coordinate of Infrared2.
Could you try resetting the calibration of your camera to its factory-new defaults in the RealSense Viewer with the instructions in the link below and see whether it corrects your Infrared 2 translation x-value, please?
https://github.com/IntelRealSense/librealsense/issues/10182#issuecomment-1019854487
-
I researched your issue further and found a case at the link below where the Infrared 2-Depth had the same extrinsics readout in rs-enumerate-devices as Infrared1-Depth.
https://github.com/IntelRealSense/librealsense/issues/4050
In the linked-to case, the RealSense user in that case also had the problem that any extrinsic that involved color, such as Color to Depth, had N/A beside it instead of listing the extrinsics like in the correct example from the image below.
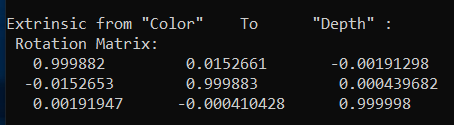
Do you have N/A beside your color extrinsics in your own rs-enumerate-devices listing, please?
-
I do not have N/A issue and I list color to Infrared extrinsic as follows:
Extrinsic from "Color" To "Infrared 1" :
Rotation Matrix:
0.999931 -0.0115592 -0.00189497
0.0115613 0.999933 0.00108789
0.00188227 -0.00110973 0.999998Translation Vector: -0.0148013643920422 -0.000198773050215095 -3.20835533784702e-05
Extrinsic from "Color" To "Infrared 2" :
Rotation Matrix:
0.999931 -0.0115592 -0.00189497
0.0115613 0.999933 0.00108789
0.00188227 -0.00110973 0.999998Translation Vector: -0.0148013643920422 -0.000198773050215095 -3.20835533784702e-05
I found my second D435i has different Color intrinsic from my first D435i. The values look different especially for principle point as shown in the following picture (in the image,the right side shows the copied values from the command output for the first D435i). As I know D435i use the same OminiVision OV9282 for the color image sensor. Why the values look different?

My last question is if Intel continue its production for depth cameras such as D435i, D450 etc?
Thank you so much!
-
Each camera has unique calibration values due to the manufacturing process in the factory (the cameras are calibrated in the factory), so it is normal for there to be differences between cameras.
The 400 Series stereo depth camera range is continuing. The L515 lidar depth model is not.
Please sign in to leave a comment.
Comments
5 comments