Intel Realsense D435 incorrect distance calculation
Hii Greetings to all,
I am using Intel Realsense D435 Camera to calculate a distance of certain object from the camera. In my scenario the camera is attached to a frame 2.5 of meters height. The distance of the object from the middle point of the the horizontal distance of object from the camera is calculated using pythagoras theorem. The camera provides the hypotunese distance.
The hypotunese distance provided by the camera is incorrect with more than -25% accuracy. How can i correct this accuracy. I read in the intelrealsense D400 documentation that D435 had a accuracy of 1% with a range of 1m.
I am using a self written python script.
-
Hi Mustafatouqri236 As you are using pythagoras maths, may I first ask whether you are measuring the distance from the camera position to an object below the camera position (e.g at ground level), like in the discussion linked to below.
-
Thank you Marty for your reply.
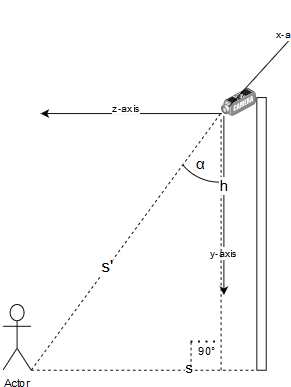
My concept is quite different from the obove mentioned. I am not using the angle to calculate the distance. The diagram above explains my concept a bit clearly. I am trying to get the distance S' from the depth stream. The H is fixed to a value of 2.5 and then i use pythagoras theorem to calculate the distance S. The problem is that the value of S' from the depth frame always less. For exaple i placed the object at a kn own distance S of 2m. Calculated this distance with the help of S' it was 1.5 with the value from the depth frame. Have you any idea why the value of S' is quite inaccurate. I have tried all the filters in the depth frame.
-
Using pythagoras may be more complicated than is actually needed for this particular application. RealSense 400 Series cameras can be tilted (a maximum of 30 degrees would be best but beyond that is possible if necessary). So if it is permissible in your project for the camera to be tilted then you could then take a direct distance measurement from the center of the camera's field of view to the observed target at ground level.
The links below provide examples of programs for taking such a reading.
C++
https://github.com/IntelRealSense/librealsense#ready-to-hack
Python
https://github.com/IntelRealSense/librealsense/issues/6749#issuecomment-654185205
Please sign in to leave a comment.
Comments
3 comments