L515, depth and RGB image alignment
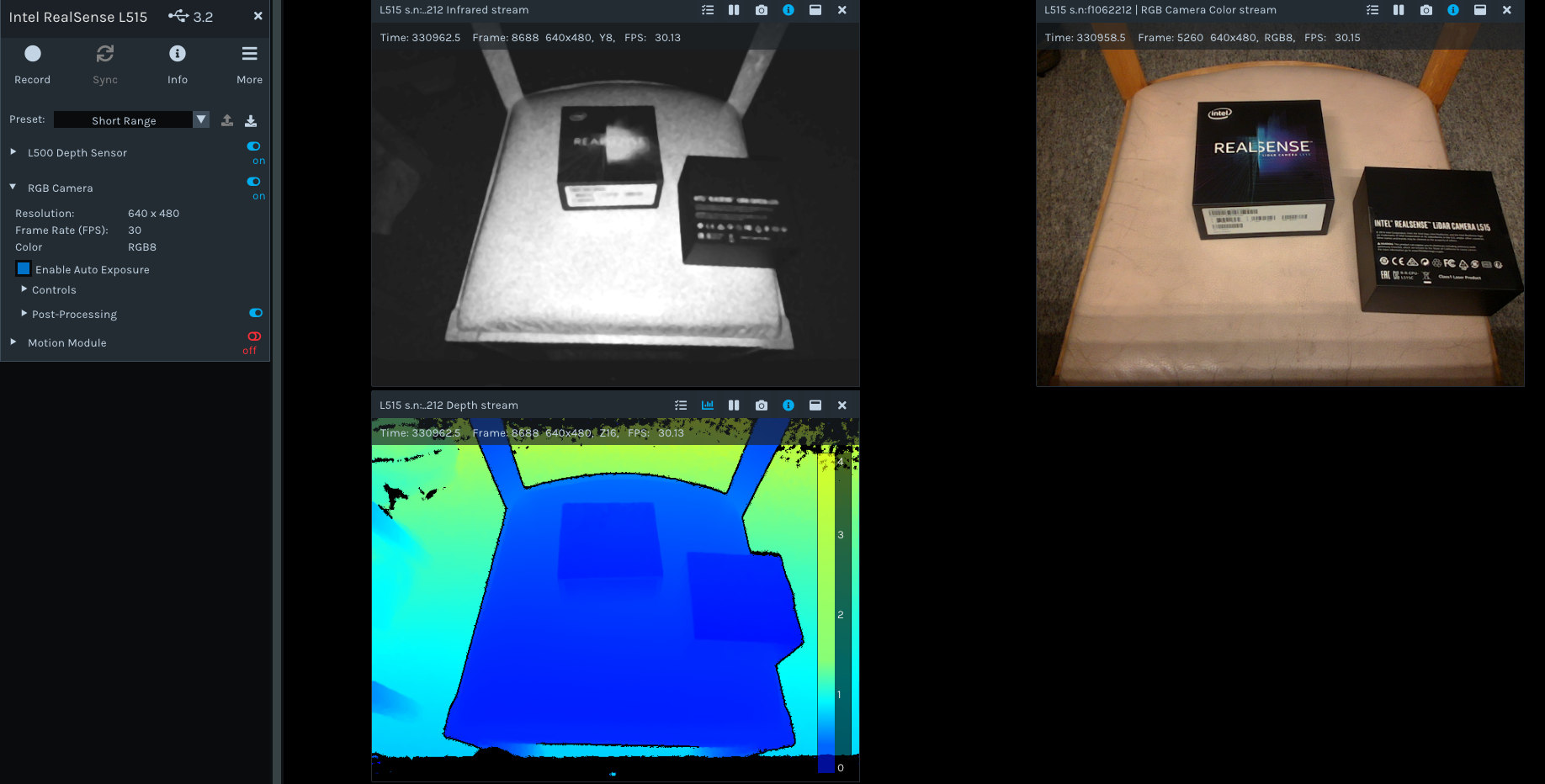
I found few discussions on this topic, but proposed solutions are not satisfactory to me. The image below shows depth/IR image and corresponding RGB image from RS-viewer. Obviously the images from 2 sensors do not match at all!
Intel is promoting that quite aggressively (e.g. https://www.intelrealsense.com/open3d/?campid=egi_WW_egirs_EN_2021_RS_Blog_Open3D_C-MKA-23569_T-MKA-25366&cid=em&content=egi_WW_egirs_EMN_EN_2021_RS_Blog_Open3D_A_C-MKA-23569_T-MKA-25366&elq_cid=6194397&elqcampid=45157&elqrid=38512769dc9348c09864f1d16c39f41f&em_id=70722&erpm_id=9310113&source=elo ), but results are really disappointing with L515, if no laborious preprocessing is performed.
An accurate calibration procedure is urgently needed here.
-
Hello Altb,
Thank you for contacting us.
There is no calibration tool available for Realsense L515. You can refer to Intel® RealSense™ LiDAR Camera L515 User Guide for better performance.
Sincerely,
Zulkifli Halim
Intel Customer Support
Please sign in to leave a comment.
Comments
2 comments