[Intel RealSense D435] Stereo vision algorithm
Hi!
I wonder what stereo vision algorithm is used in the Intel RealSense D435 camera to generating the depth images.
Intel refers to a SGBM-algorithm if you want to program it yourself in OpenCV, is that the same algorithm implemented in the camera?
-
Hi Johan E Ekman Pages 16 and 17 of the current edition of the data sheet document for the RealSense 400 Series stereo cameras provide basic details of how the 400 Series cameras generate depth from the left and right sensors.
https://dev.intelrealsense.com/docs/intel-realsense-d400-series-product-family-datasheet
-
Hi Wl2776 I wonder if the information resource being referred to is Intel's Depth from Stereo guide, as it discusses the SSD (Sum of Squared Differences) block-matching algorithm, and use of stereobm and stereosgbm with OpenCV for disparity calculation.
https://github.com/IntelRealSense/librealsense/blob/master/doc/depth-from-stereo.md
-
Algorithms used by RealSense cameras are typically not shared publicly due to being Intel's private intellectual property and are not open-source.
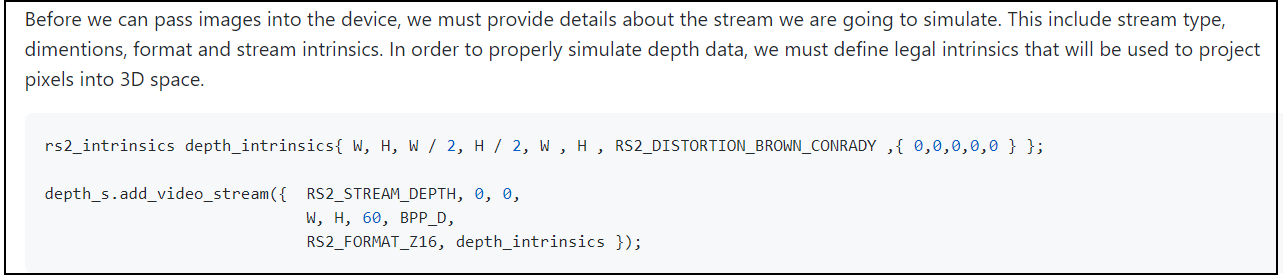
The RealSense SDK does offer the software_device interface for emulating RealSense devices.
https://github.com/IntelRealSense/librealsense/tree/master/examples/software-device
-
I've downloaded SDK and launched the example... Only depth post-processing can be tested. Examples assume that depth is coming from outside.
Up to now I've found this paper: https://arxiv.org/abs/1705.05548
It outlines some details on older devices.
Please sign in to leave a comment.
Comments
8 comments