Can you access raw synchronized D435 output?
I'm interested in a stereo camera which I have access to the raw images from, I understand the D435 uses IR based stereo vision but regardless - can you stream synchronized frames to your PC which consist of both of the cameras raw captures? This allows you to write your own custom stereo vision routines if you want.
-
Hi Lowellm Most of the stream formats that are available are rectified, meaning that the camera hardware makes adjustments to the data before it is sent to the computer. The "Y16" format IR channel is unrectified though, and you can stream left and right Y16 IR. It is a format designed for camera calibration rather than everyday use though, so the resolution and frames per second speed modes available for it are very limited compared to all the other rectified stream types.
https://github.com/IntelRealSense/librealsense/issues/3294#issuecomment-465621853
There is also the option of using the Low-Level API to access the camera hardware directly.
https://github.com/IntelRealSense/librealsense/blob/master/doc/api_arch.md#low-level-device-api
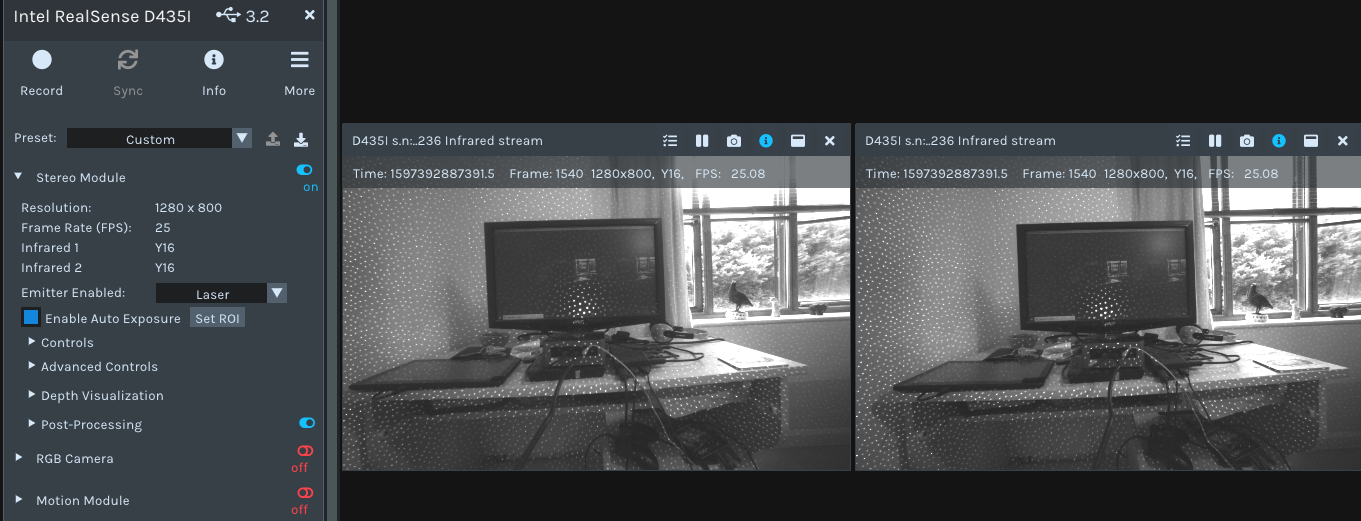
In the image below that I created with a D435i camera, the RealSense Viewer program is streaming left and right Y16 IR at 1280x800 resolution at 25 FPS:
-
My understanding is that left and right IR are time-synced. On the 400 Series cameras the depth frame is generated from the left and right IR images. The left and right imagers capture the scene and sends imager data to the depth imaging processor, which calculates depth values for each pixel in the image by correlating points on the left image to the right image and via shift between a point on the Left image and the Right image.
Please sign in to leave a comment.
Comments
3 comments