Technology, data output, under water use
Hi there,
I'm interested in the Intel RealSense depth Camera but haven't decided which one to buy, yet.
- The D435/D455 use stereovision and structured light technology (infrared?): Is it also possible to use it in poor light conditions or even in the dark?
- How is the output format of the camera data?
- On the support page it is written that the new camera (the D455) has twice the range of the D435, but on the camera pages I find a range of up to 10 meters of the D435 and up to 6 meters of the D455... What's the right information?
- If someone has further information for the use of the RealSense Depth Camera for recording objects and structures under water (through glas from the outside - like in a aquarium) along with Python, I would be very grateful to get a hint.
Thank you very much for your support!
Best regards
Kathi
-
Hi Kathi, the 400 Series cameras are able to see in low light. They are based solely on Stereo technology, using a left and right infrared imager.
They do not have structured light / coded light technology, which is based on projection of patterns onto surfaces. That is used in the SR305 camera model, which can operate at zero 'lux' lighting conditions (darkness) but is suited to indoor use rather than outdoors. The 400 Series can be used both indoors and outdoors.
The new L515 lidar depth camera model (not Stereo) is advanced technology that can analyse 23 million accurate depth points per second but it is designed for use indoors or in controlled lighting conditions, so would not be suited for outdoor underwater use. It may be able to work with an indoor aquarium setting if the lighting is stable though.
The T265 Tracking Camera does not have depth sensing capability, so would not be suitable for a depth-based application (though it can be paired with a depth camera).
The 400 Series cameras can use any available ambient light for analysing the depth in a scene. This can include artificial light sources positioned near the camera. In dark scenes without a light source (natural or artificial), the camera's built-in projector can project light and a semi-random dot pattern onto objects in a scene to analyse their depth information.
The 400 Series cameras are also able to operate underwater within a waterproof container and to see through aquarium glass. The stereo depth algorithms in the 400 Series are very good at handling underwater scenes. The link below has an example program in the Python programming language for doing so.
https://github.com/IntelRealSense/librealsense/blob/jupyter/notebooks/depth_under_water.ipynb
Data can be exported from the camera's RealSense SDK software in a range of formats, including bag, png, raw, bin, ply and csv.
Regarding the D455's range ... like the D435, it can depth-sense to a maximum range of 10 meters plus, as shown by the extract below from the data sheet document for the D455.
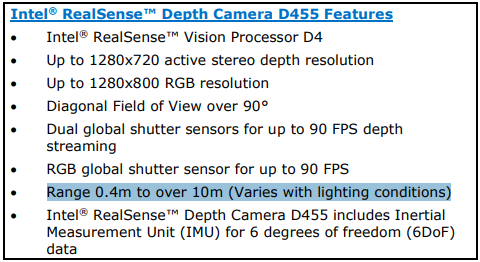
It is important to note though that 6 meters is the optimal depth sensing range of the camera. In previous 400 Series models, although the cameras could see 10 m, their depth measuring accuracy starts to noticably reduce after around 3 meters from the camera. This is because error increases linearly as the distance of an observed object from the camera increases. This is called RMS Error.
The D455 model though has improved accuracy over the D435 model by a factor of two. So accuracy should be maintained up to the 6 meter distance instead of 3 meters on the older 400 Series models.
-
Hi Wervyan I would not speculate on what depth image results you might get from depth sensing underwater due to the large range of possible different lighting and environmental conditions under the water's surface. As a rough guide to expectations though, the depth-sensing images on the recent FishSense underwater project's video in the YouTube link below may be helpful.
Please sign in to leave a comment.
Comments
5 comments