Detection of metal screws in a component
Hello community,
I have a use case that involves finding screws in a metal component. Currently i have a camera on top and recognize with image recognition all positions of the screws. The problem what happens from time to time the system confuses screws with missing screws i.e. holes. Since I cannot allow the system to confuse holes with screws, but only screws with holes, it is very strict.
My question would be can I reliably detect such holes in a metal body with the new lidar camera or with any other depth camera from intel?
My other question would be if I could also see within the scope of tolerance how deep the screws are mounted
The screws have a 1 cm radius.
If the radius is too small from when would you say it becomes possible?
Many thanks for your help
-
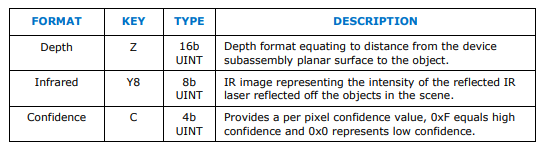
The new RealSense L515 lidar depth camera can analyse 23 million accurate depth points per second and does not need to be calibrated during its lifespan. It can also provide a per-pixel confidence value.
The 400 Series stereo cameras do not have a confidence value feature, though they can do something similar using a feature of their Advanced Mode called Second Peak Threshold.
https://github.com/IntelRealSense/librealsense/issues/3185#issuecomment-460540961
An easy way to discriminate between holes and screws may be to check the depth of the observed object. If it can read the inside of a hole then that should provide a greater depth value than if the camera is observing the top of a screw, because the screw head will be closer to the camera. There was a previous case on this forum that discussed using 400 Series depth cameras to analyse hole depth at close range.
If the camera that is observing top-down has a fixed position and the component being observed is always at the same height then you should also be able to observe the inserted depths of screws in the hole by reading the measured distance from the camera of the screw-head.
Of the 400 Series cameras, the D415 model will give best accuracy, as it has around 2x the image quality of the D435 models and and optimal depth sensing resolution of 1280x720, compared to 848x480 on D435 (higher resolution = greater accuracy).
The cameras should be able to cope with a 1 cm radius. The Chief Technical Officer of the RealSense Group at Intel has said that the 400 Series cameras can track an object that takes up at least 9 pixels.
.https://github.com/IntelRealSense/librealsense/issues/4175#issuecomment-507448389
Please sign in to leave a comment.
Comments
1 comment