range of D435 depth camera in darkness or poor lighting condition
In the official documentation the range of the cameras is 10 m. however, if it is in low lighting or complete darkness, what would be the maximal range?
I need to detect depth at around 8 meters. Just wondering if it can detect anything at that range while in darkness.
-
Multiple sources say about the 400 Series cameras that they have low light performance with < 1 lux minimum sensitivity.
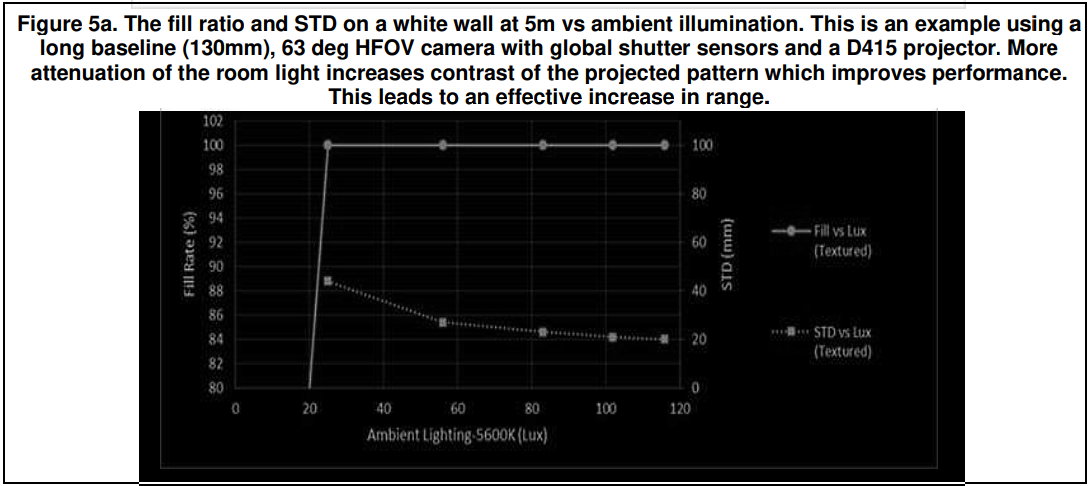
Intel's recently released white paper on use of external projectors with RealSense states that without the aid of a projector, less than 25 lux is needed to see a well-textured scene at a range of 5 meters.
An NCBI paper looked at the performance of the D435 at different lux levels to see how RMS (error over distance) was affected. They found that when observing a large ball, the D435 was fine at any lux intensity. When observing a smaller object such as a small ball at higher lux intensity, the D435's error value increased (they did not experience this with the D415 camera model). This can be attributed to the larger width of the D435's IR imager, which can let in more light than the D415's smaller-width IR imager but increase the potential for noise.
NCBI's chart can be viewed here:
I believe that at the light conditions you have in mind (complete darkness), a wide imager like the D435's is the better choice.
A pattern projector can certainly be used in the dark though to provide texture for the camera to translate into depth detail.

-
I do not have data for that exact scenario. In general, precision should not be expected when sensing at that distance. Using a pattern projector may not be ideal if you need to isolate and detect individual objects, due to the camera having difficulty separating the object from the pattern projected over the scene.
Past cases also suggest that measuring the distance from the camera of objects will not work because unless the object is very thick, the edges will not be wide enough for the camera to see properly from afar.
Using a Deep Neural Network (DNN) to identify objects on an RGB image may not be a viable option either if the RGB image is going to be almost completely dark due to a lack of lighting in the scene.
The Chief Technical Officer of the RealSense Group at Intel (agrunnet) offers advice about IR illumination in this discussion:
Please sign in to leave a comment.
Comments
3 comments