RealSense D415, D435 and D455 main differences
At the moment I'm using D415 camera but for my application the FoV at 1m of distance is very adjusted.
I have seen that D435 have more FoV here
But in the specs page of D435 the rgb FoV is the same of D415, so I'm little bit confused about the D435 FoV.
In the document says also that Depth detection on D435 is a little bit noisier than D415, but the minimum depth distance is better tham D415.
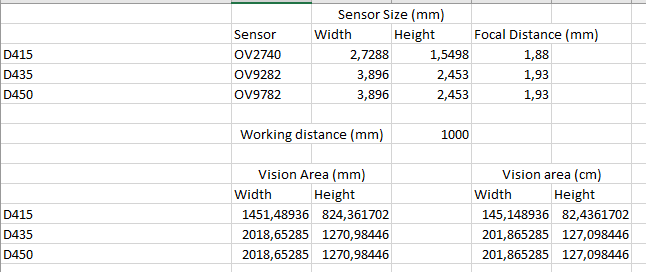
In the following table I'm using sensor specs to calc the Field of View at 1m, it seems that D435 and D455 have the same FoV.
I have done the following table to calc Fov at 1m far from the camera lens using the sensor specs and focal distance of cameras obtained from specs: (Sensor size * distance) / Focal Distance. It seems that D435 and D455 have the same Fov for RGB.
So my question is which one is the recommended model if I need more Fov than D415 and also good depth detection at 30-35 cm. I need to measure in some situations objects at 30-35cm far away from camera lens.
With regards,
-
Hi Juan Diezyanguas D415 excels at scanning small static objects with high quality and low noise. D435 excels at capturing during fast motion (either the camera moving fast or observing fast moving objects such as full speed vehicles). It has a smaller minimum depth distance, a fast 'global shutter' on the left and right infrared sensors and a wider FOV. This suitbility to fast motion capture means that depth noise can be higher than D415 though.
The D435 model has the same RGB sensor component as the D415. This sensor also has a 'rolling' shutter that is slower than the global shutter on the left and right sensors of D435. So whilst D435 has fast depth capture, capturing RGB of fast motion may result in blurring or lag of the RGB image. A workaround for this is to stream depth at 30 FPS and RGB at 60 FPS so that the two streams are relatively equal in speed.
In summary, D435 has a smaller minimum depth distance than D415 and so can be placed closer to observed objects / surfaces than D435. It also has a larger FOV than D415 on the depth sensor.
D455 would not be suitable for your project as although it has a wide FOV and fast global shutters on both RGB and depth sensors, it should be placed at least 0.5 meters / 50 cm from the observed object / surface.
If you plan to do depth-color alignment with D435 then if you perform color to depth alignment instead of the common depth to color method then the smaller RGB FOV size will resize to match the D435's larger depth FOV size.
-
Hi MartyG,
My application it's not very fast (person motion), but in some situations we need depth measuring close to the camera lens, that because I have mentioned D435.
Regarding the RGB sensor its the other fact that I'm worry about it, because when the objects are closer to the camera, the fov it's not big as enought for my application.
I thought that the RGB sensor of D435 was better in Fov because I have been read about it in mentioned document (as you can see in following table). Rgb sensor model mentioned is not the same, and either the focal distance.
About alignment I don't think that could be a good fix for that if the RGB sensor fov is less than the depth sensor. Even if you resize the rgb image to depth size, it's impossible to "invent" objects that are outside the Fov of Rgb sensor.With regards,

-
Omnivision sensor component OV2740 is used by both the RGB and left & right sensors on D415.
On D435, OV2740 is used for the RGB sensor and the wider OV9282 sensor is used for the left & right sensors which generate the stereo depth image.
A compromise solution may be to use a wide-FOV D455 and set a large Disparity Shift value to reduce its minimum distance closer to that of a D415. The official RealSense Store lists the RGB FOV of D455 at 90° × 65° compared to 69° × 42° for D435.
An effect of using Disparity Shift is that whilst minimum depth distance reduces, the maximum observable depth distance also reduces. This may not be a problem when doing relatively close-range sensing though.
Another possibility could be to use the D405 model. This camera is specially designed for high accuracy, high quality images at close range, with an ideal depth sensing range of 7 cm to 50 cm (7 cm is its default minimum distance). It has an FOV of 87° × 58° on both depth and RGB. This is because D405 does not have a separate RGB sensor, so it obtains RGB from the depth sensor and passes it through an Image Signal Processor (ISP) chip inside the camera to generate the final RGB image.
D405 is not equipped with an infrared dot pattern projector though, so it may not be suited to situations where there are low lighting conditions or objects that have plain surfaces with low texture detail or no texture.
-
I supose that in D435 the wider sensor OV9282 used for generating Depth image is not possible to use to get RGB image. I don't understand very well what is the utility of having more FoV on depth sensor than RGB sensor... In this case you are getting depth information from objects that are not seen in RGB camera.
Regarding the use of D455 my ideal distance range will be from 30-35 cm to 1.80-2m aprox. Do you think that using disparity shift could be a fix for that?
For D405 I have seen that is designed for max of 50cm, I supose that I can't use for the mentioned range.
With regards,
-
No, you cannot obtain an RGB image from the depth sensor on the D435 type models. A feature called 'RGB from left infrared sensor' is supported on D405, D415 and D455 though. A 'left infrared' RGB image is colored differently from one from a dedicated RGB sensor.
In my experience, the camera model that provides left-infrared RGB that most closely matches full RGB is D405, with D415 a close second. Below is a comparison from a D405 of full RGB on the left and left-infrared RGB on the right.

D405 does not have a dedicated RGB sensor and obtains its RGB from the depth sensor. So both types of RGB are coming from the same sensor and have the same viewpoint, with the difference that the "normal" RGB image undergoes additional processing through an ISP chip.
I could not guarantee for a D455 that raising Disparity Shift to a value high enough to achieve your minimum distance goal is going to leave enough of the background remaining to also meet your maximum distance goal.
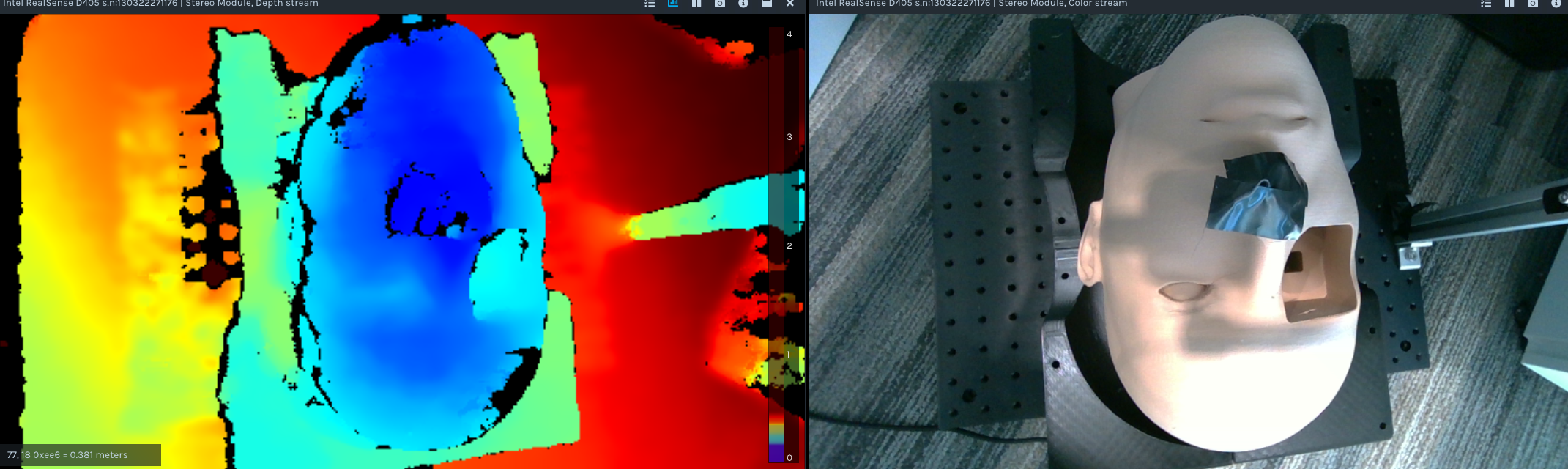
7 cm to 50 cm is the ideal depth sensing range of D405, though it can see a couple of meters. Depth value inaccuracy increases as distance from the camera increases. The image below shows a a window with curtains around 2 m away. The broken-up black area in the top corner is simply because reflective window glass is difficult for the camera to obtain depth from without adding a filter to the camera lenses. Otherwise, the depth accuracy of the curtained area at 2 m is very good in that image.
-
And how would you recommend to set disparity Shift? I have seen in white papel and RealSense Viewer but I cannot see how to change it or something like a Formula.
Do you know how to change disparity shift in C# api?
It's difficult to know what is the best to suit in the concrete application without having them ..
Can you show an image of D405 using Dynamic and Jet Colorizer? I think that its easy to see occuracy with this configuration.
With regards,
-
The best way to set the Disparity Shift in C# would be to set the value in a json camera configuration file and then import the json file into your script to apply the setting, as described at the link below.
https://github.com/IntelRealSense/librealsense/issues/9609
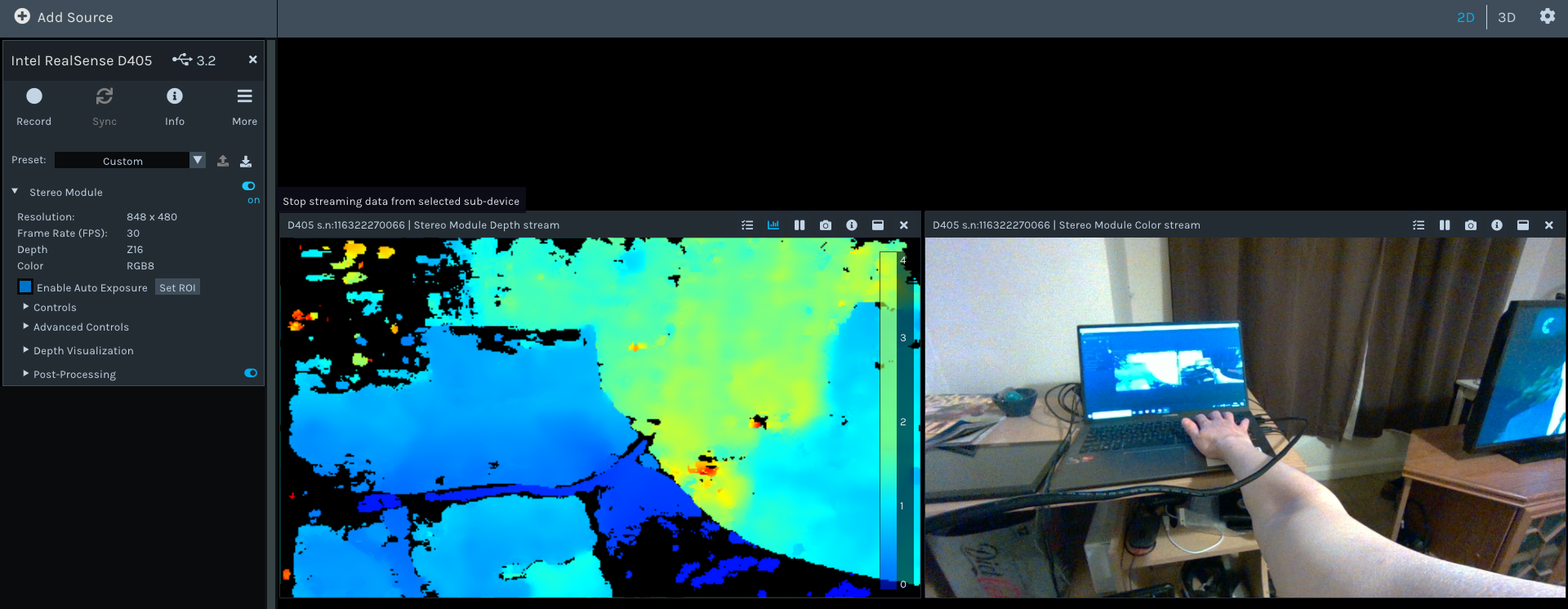
Below is an example of a D405 image using the default Dynamic / Jet colorizer settings.
Please sign in to leave a comment.
Comments
7 comments