D455 depth image values - what distance is represented?
I would like to know what the depth values in a depth image of a D455 are representing.
Is that the distance value of a lightray coming from the center of the camera hitting the object?
So when i face the camera on a perfectly planar surface i would expect a higher sitance in the corners compared to the center?
Or is it the distance expressed as a "Z" value in a "X/Y/Z" coordinate system so that when placing the camara again in front of a wall would give me exactly the same distance at each pixel position?
-
Hi Huawatuam Pages 17-18 of the data sheet document for the 400 Series cameras provide the following description for how depth is calculated.
https://dev.intelrealsense.com/docs/intel-realsense-d400-series-product-family-datasheet
******
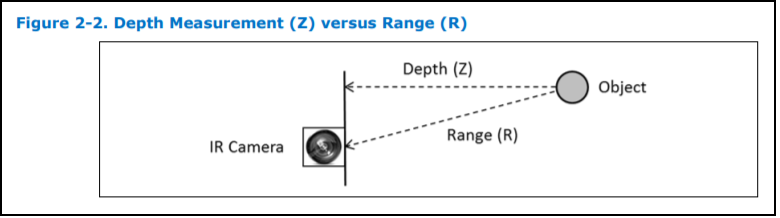
The Intel RealSense D400 series depth camera uses stereo vision to calculate depth. The stereo vision implementation consists of a left imager, right imager, and an optional infrared projector. The infrared projector projects non-visible static IR pattern to improve depth accuracy in scenes with low texture.
The left and right imagers capture the scene and sends imager data to the depth imaging (vision) processor, which calculates depth values for each pixel in the image by correlating points on the left image to the right image and via shift between a point on the Left image and the Right image. The depth pixel values are processed to generate a depth frame. Subsequent depth frames create a depth video stream.
The depth pixel value is a measurement from the parallel plane of the imagers and not the absolute range, as illustrated.
*****
The 'world origin' (0,0,0) of the coordinate system is the center of the left infrared sensor. The coordinate system is described in the links below.
https://github.com/IntelRealSense/librealsense/issues/7279#issuecomment-689031488
https://github.com/IntelRealSense/librealsense/issues/7279#issuecomment-690188950
Please sign in to leave a comment.
Comments
1 comment