The dense depth map of a chessboard without laser
Hi,
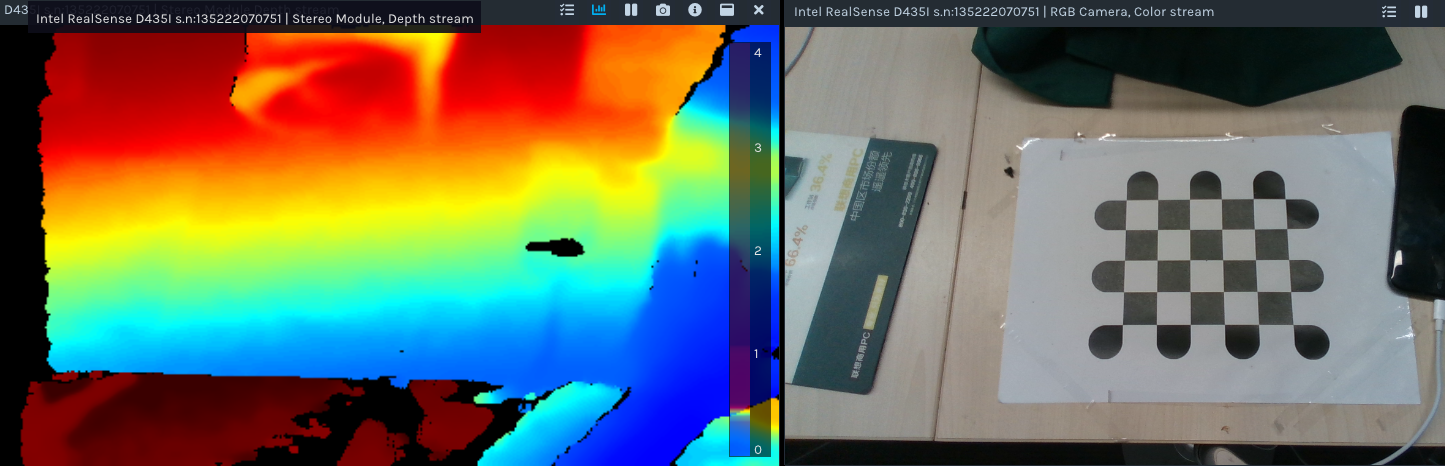
I have a chessboard and its depth map and reconstructed surface look good with D535i. I am curious about the result. The following picture comes from 3D visualization for a chessboard in Intel Realsense Viewer. I disable the laser but the result looks good. Although the chessboard has strong features near the corners, but most regions are textureless. I think it is hard to produce a dense depth map without laser. But in fact the depth map looks dense.
Can anybody explain this to me?
Many thanks.
Yixun
-
Hi Yixun Liu Chessboards are a pattern that is easily recognizable to RealSense cameras as they commonly use that pattern for camera calibration. An example of this is the RealSense Dynamic Calibration print target image.
https://dev.intelrealsense.com/docs/dynamic-calibration-print-target
Another example is the chessboard image used by the Python example program box_dimensioner_multicam.py to calibrate together the positions of multiple cameras placed around the chessboard.
-
Hi MartyG I know the chessboard is a regular calibration pattern. But from 3D reconstruction point of view the chessboard is not a good object because it has repeated pattern and lacks texture in most regions except the corners. But the depth map is dense and looks good. Given left and right infrared images I think the correspondence only can be found at the corners so the depth map should be very sparse. Is the dense map produced by some post processing?
{kind=link}
Please sign in to leave a comment.
Comments
3 comments